Полноприводная муфта Haldex поколения V
AvtoAd
06/10/2022
Разработка и внедрение модели полноприводной муфты Haldex пятого поколения
Содержание
1. Введение .
1.1. О полноприводной муфте Haldex .
1.2. История компании.
1.3. Тяговые системы Haldex .
1.4. Предыдущие поколения .
1.5. Поколение IV .
1.6. Поколение V.
2.2. Гидравлический насос .
2.3. Гидравлическая жидкость .
3. Завершенная модель .
4. Результаты и подтверждения .
4.1. DC-машина .
4.2. Гидравлический насос .
4.3. Гидравлическая жидкость .
4.4. Завершенная модель .
5. Вывод .
6. Приложение: Модель Simulink .
Читайте также как снять и установить муфту Haldex .
Вступление
О полноприводной муфте Haldex
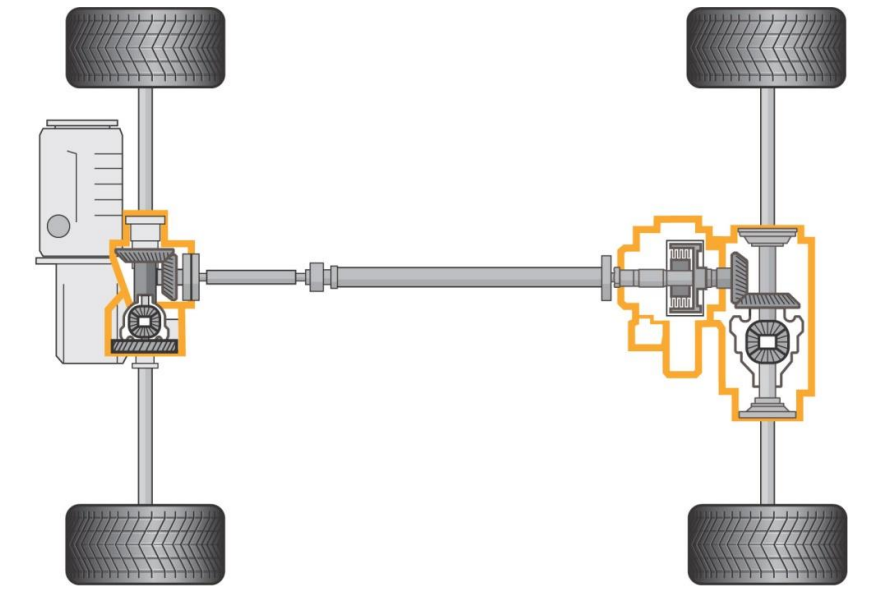
При вождении в сложных условиях, таких как снег, лед и грязь, обычный автомобиль с двухколесным приводом не справится. Для повышения безопасности и производительности многие производители автомобилей предлагают альтернативу с полным приводом. Однако существует большое разнообразие установок полного привода. Некоторые системы полноприводны, что означает, что все колеса постоянно получают крутящий момент от двигателя. Величина крутящего момента, распределенного между передней и задней осью, может иметь фиксированное соотношение обычно 50/50 или быть переменной. Такие системы полного рабочего дня распространены среди азиатских производителей автомобилей, таких как Subaru и Toyota. В качестве альтернативы системам полного рабочего дня существуют системы, называемые неполным рабочим днем. Автомобили, использующие систему неполного рабочего времени, могут иметь передний или задний привод при нормальных условиях вождения. Для распределения крутящего момента на другую ось требуется какое-либо устройство для передачи крутящего момента. Существует множество разных решений, как этого можно добиться. Для передачи крутящего момента между правым и левым колесами требуется дифференциал, способный распределять доступный крутящий момент.
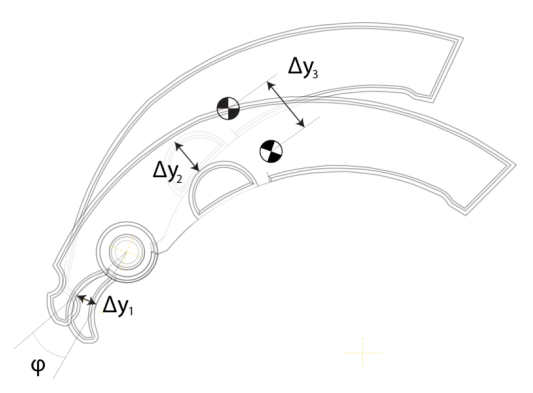
Иллюстрация трансмиссии. Выделенные зоны – это задняя и передняя дифференциалы и муфта полного привода:
В современных автомобилях эти системы обычно интегрированы с другими системами, такими как ABS и ESP. Эти системы получают данные от ряда бортовых датчиков. Если автомобиль начинает буксовать, система автоматически включается и помогает водителю стабилизировать автомобиль.
Помимо повышения безопасности одним из преимуществ системы неполного рабочего времени является несколько уменьшенное потребление топлива благодаря уменьшению потерь в трансмиссии. Кроме того, систему неполного рабочего дня труднее контролировать, и она часто страдает задержками. Она требует быстрой и надежной стратегии управления, чтобы предотвратить неожиданное поведение системы.
При разборке таких алгоритмов большое значение имеет модель системы. Время и деньги можно сэкономить, если снизить необходимость тестирования программного обеспечения непосредственно в системе.
История компании
Концерн Haldex был создан в 1985 году путём слияния трех шведских компаний: Garphyttan, Haldex и Hesselman. В то время основным источником прибыли была промышленность производства пружинной проволоки, на которую приходилось 50 процентов от общего объема продаж. Однако в 2009 году подразделение было продано, и ныне основной доход приносят отделы "Тяга" и "Гидравлика". После приобретения Barnes Corp в 1987 году и Vickers в 1991 была создана гидравлическая часть концерна. Патент на новый полный привод был куплен в 1992 году. Первое поколение сцепления было выпущено на рынок в 1998 году. В этот же год был создан Haldex Traction Systems как подразделение концерна Haldex.
Тяговые системы Haldex
Патент, приобретенный Haldex в 1992 году, был куплен у бывшего гонщика по ралли Зигге Йоханссона. Основная идея заключалась в том, чтобы сцепление приводилось в действие насосом, приводимым в действие разностью скоростей вращения колес. Компания Haldex разработала сцепление в тесном сотрудничестве с Volkswagen. В 1998 году началось серийное производство сцепления 1-го поколения. С тех пор многие компании использовали сцепление в своих автомобилях, включая Volvo, Ford, Bugatti и SAAB/GM [2]. С 1998 года сцепление совершенствовалось и сейчас разрабатывается пятое поколение. В 2009 году компания Haldex объявила о соглашении с Volkswagen стоимостью 4,5 миллиарда шведских крон по обеспечению следующей платформы этой системой пятого поколения.
Предыдущие поколения
Первые два поколения полного привода достаточно схожи и приводятся в действие разницей в скорости колес. Это движение приводит в действие гидравлический насос, создающий поток и приводящий в действие LSC. Это означает, что эти системы являются реактивными, то есть, прежде чем включится система, должна произойти пробуксовка колес. 1/4 оборота колеса создает достаточный поток, чтобы полностью зафиксировать ось. Уровень давления в LSC контролируется ЭБУ и регулируется линейной дроссельной заслонкой. Поколение II является дальнейшим развитием первого поколения, но благодаря большему количеству датчиков и пропорциональному электромагнитному клапану общая производительность была повышена. Чтобы еще больше сократить время отклика, Haldex представил поколение III с возможностями предварительного натяжения PreX. Добавление небольшого питающего насоса, обеспечивающего крутящий момент на задние колеса, даже если колесо не пробуксовывает, уменьшило время реакции. Благодаря добавлению этой функции система теперь проактивна, что означает, что она способна регулировать потребность в полном приводе в режиме реального времени на основе информации, предоставляемой бортовыми датчиками.
Поколение IV
С поколением Haldex IV была представлена уникальная система полного привода. Система описывается как интеллектуальная и способная ощущать намерения водителя. Крутящий момент все время распределяется между четырьмя колесами. Однако распределение может быть от 2% от общего количества до 85% на одном заднем колесе. Благодаря передаче только 4% крутящего момента на заднюю ось во время движения потребление энергии уменьшается. И если скольжение происходит на трех шинах одновременно, как можно больше доступного крутящего момента передается шине, имеющей сцепление. Это распределение между задними колесами контролируется многодисковой муфтой, регулируемой гидравлическим давлением. В предыдущих поколениях были жалобы на задержку времени отклика. Это произошло из-за того, что мы не смогли достаточно быстро накопить давление. Благодаря вводу аккумулятора с отдельным питающим насосом высокое давление может быть мгновенно доступно для контроля. Этот контроль производится электрическим блоком управления (ECU). Используя более 20 датчиков вокруг автомобиля, ECU обновляет распределение крутящего момента 100 раз в секунду.
Поколение V
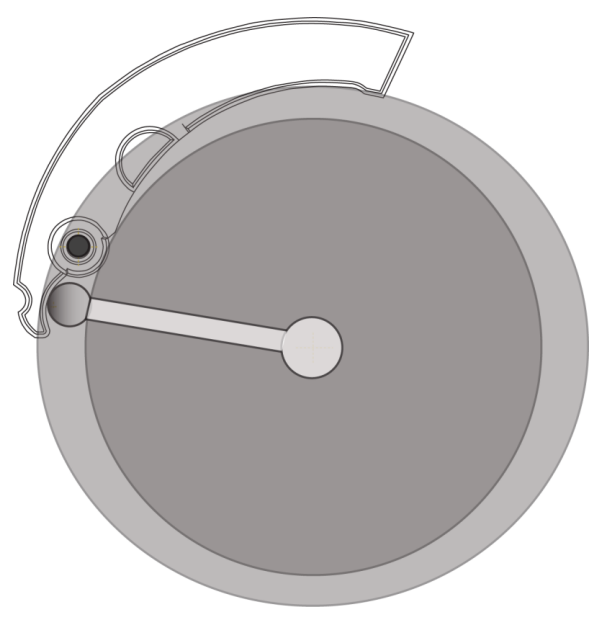
Чтобы снизить вес и пространство, аккумулятор и регулирующий клапан, добавленные к муфте четвертого поколения, теперь удалены. Вместо этого давление должно создаваться непосредственно в пакете сцепления с помощью специально разработанного питающего насоса. Насос - это машина, создающая поток, текущей средой является гидравлическое масло. Давление на пакет сцепления создается, когда масло закачивается в камеру, содержащую поршень, передающий это давление на диски. Для поддержания достаточно низкого времени отклика насос имеет конструкцию, в которой поток жидкости имеет два разных пути, по которым его можно направлять. Когда достигается стабильное состояние давления, жидкость больше не поступает в сцепление, а только выкачивается в окружающую систему. Когда требуется повышение давления, выход закрывается и весь поток поступает в пакет сцепления.
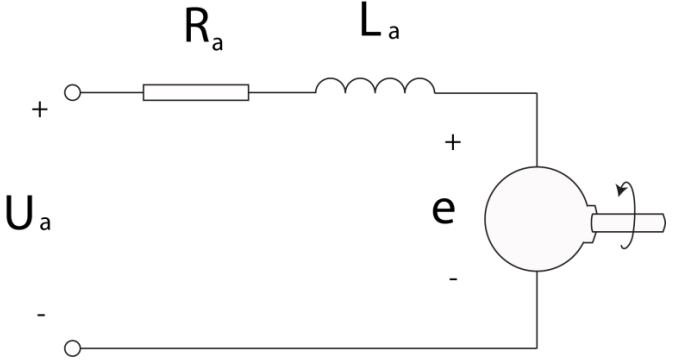
Теория и моделирование
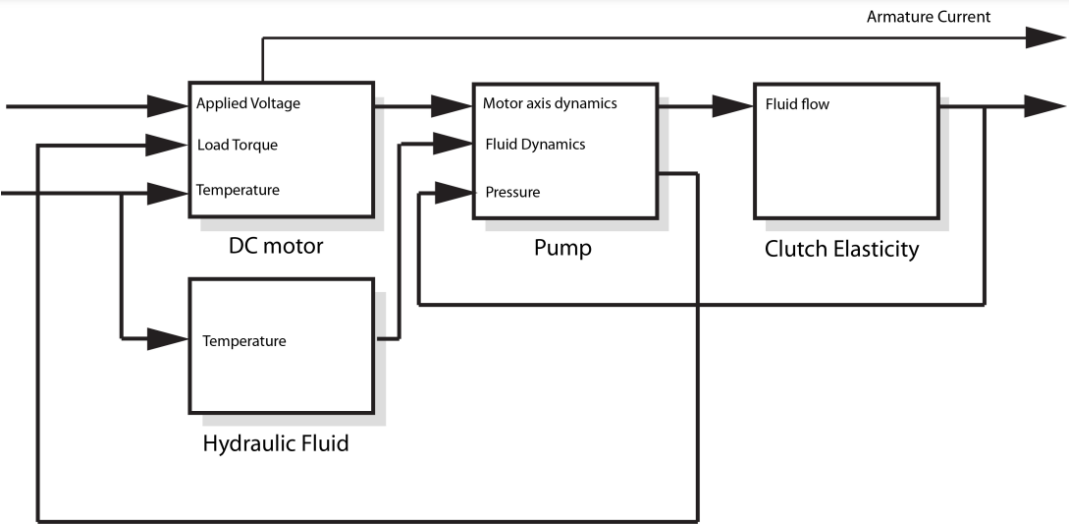
Полная модель состоит из четырех подсистем: двигателя, насоса, масла и многодискового сцепления. Можно просмотреть модифицированную версию оригинальной схемы, иллюстрирующей систему Gen V. Первой системой будет электродвигатель. Сигналами, поступающими в эту подсистему, являются напряжение якоря и температура. Эти сигналы тоже являются сигналами в полной модели. Исходные данные из подсистемы двигателя – это ток якоря и динамика оси двигателя, то есть скорость вращения, ускорения оси и положения.
Схема муфты Gen. V Haldex:

Динамика оси двигателя вводится в подсистему насоса вместе с динамикой масла и давлением сцепления. Выход от насоса – это чистый поток, входящий или выходящий из насоса. Этот поток является входом модели сцепления, которая оказывает давление в сцеплении как выход. Затем это давление подается к насосу. Подсистема, рассчитывающая динамику масла, имеет температуру как входной сигнал и затем подключается к насосу. Выход полной модели – это давление в муфте и ток якоря.
Структурная схема подсистем полных моделей:
Машина постоянного тока
Машина постоянного тока часто используется как исполнительный механизм по всей промышленности сегодня. Фундаментальная конструкция машины делает ее крепкой и меньшей вероятностью неисправности или поломки во время работы. Он также имеет почти линейное соотношение напряжения якоря и скорости и почти линейное соотношение тока и крутящего момента, что делает его относительно легким для управления. В данной главе будет рассмотрен привод насоса генератора. V система полного привода. Сначала будет краткое описание принципа работы машины постоянного тока, а затем обзор уравнений двигателя. Ген. V двигатель – это 12-полюсная машина постоянного тока с постоянным намагничением. Поскольку фактических данных о времени работы нет, стандартные уравнения двигателя будут использованы для моделирования двигателя. Будут сделаны некоторые дополнения по разным видам трения. Модель, реализуемая в Simulink, также учитывает разные виды температуры окружающей среды. Данные для этого предоставил изготовитель.
Принцип работы
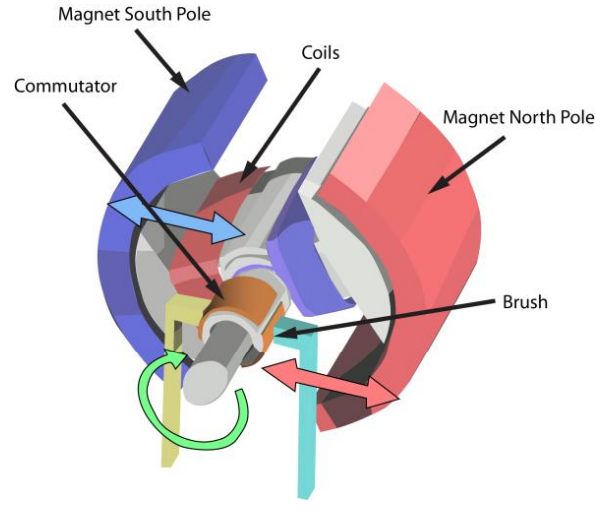
Двигатель PMDC состоит из обмоток, установленных на роторе, нескольких северных и южных полюсных магнитов, расположенных попарно, и коммутатора. Постоянные магниты установлены вокруг статора. Коммутатор – это набор медных проводников, закрепленных на роторе. Ток передается коммутатору через пару угольных щеток, которые скользят по поверхности коммутатора, когда ротор вращается. Когда щетки сменяют пластину, ток в катушках изменяет направление. Поскольку ток в катушке создает магнитное поле, изменение направления тока также изменяет полярность этого магнитного поля. Расположение катушек и коммутаторов таким образом, что индуцированное магнитное поле притягивает или отталкивает магниты в статоре, создает крутящий момент.
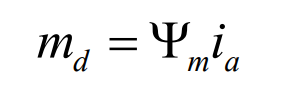
Управляющие уравнения
Дифференциальные уравнения описывают ток якоря, ia, индуцированное напряжение в якоре, ua и электрический крутящий момент, md.
Уравнение:
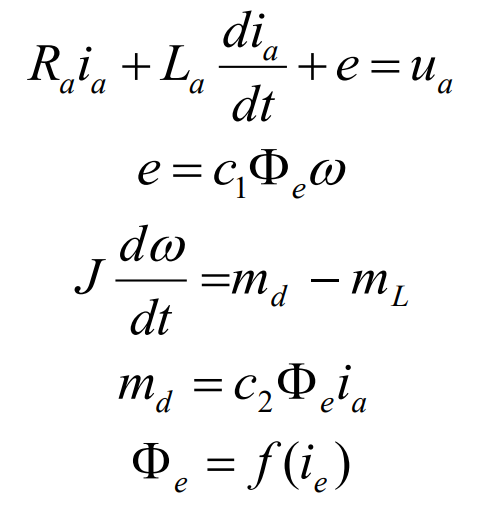
где mL – момент нагрузки на ось двигателя. Эта модель является одной из машин постоянного тока с отдельным выходом, и поэтому также включает функцию для электрического магнитного потока. Поскольку двигатель у Gen V является двигателем PMDC.
Уравнение:
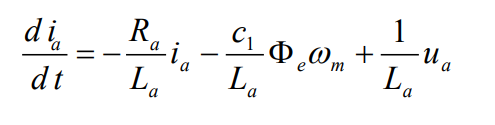
Получаем окончательное уравнение тока:
Производитель двигателя постоянного тока предоставил зависящие от температуры данные и константы для двигателя. Подходящими константами являются константа крутящего момента kT и константа напряжения kE.
Трение и потери
Уравнения, представленные в предыдущей главе, не включают никаких потерь в двигателе. Здесь возникают два вида потерь на трение [4]; вязкое демпфирование и динамический момент трения. Оба они зависят от температуры. Вяжущее демпфирование – это момент трения, вызванный смазочной жидкостью и движущимися частями двигателя, и считается прямо пропорциональным скорости. Динамический момент трения является кулоновским трением и считается постоянным членом, придающим потери.
Добавляя эти условия и вводя новые обозначения, получаем окончательное уравнение крутящего момента:
Где mFi – вязкое демпфирование, а mTfd – момент динамического трения.
Другие явления, такие как вихревые токи и ослабление поля, также повлекут за собой потери. Вихревые токи возникают, когда проводник подвергается изменению магнитного потока. Это может привести к циркуляции тока внутри проводника. Эти циркулирующие токи создают магнитное поле, противостоящее магнитному потоку от постоянного магнита. Ослабление поля происходит, когда ток протекает через обмотки катушки. Ток создает магнитное поле, искажающее и ослабляющее поле так же, как это делают вихревые токи. За неимением экспериментальных данных влиянием этих явлений будем пренебречь.
Итоговые моторные уравнения
При использовании уравнений и новых обозначений получены основные уравнения для машины постоянного тока:
где Rt, kE и kT – параметры, зависящие от температуры.
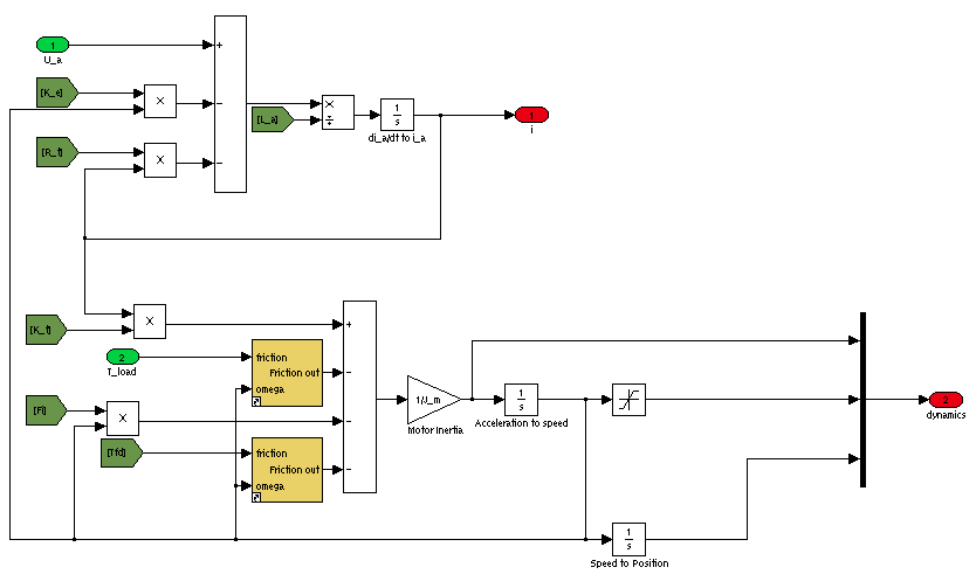
Модель Simulink
Блок двигателя у модели Simulink имеет три входа: напряжение якоря u_a, нагрузку от насоса T_load и температура двигателя Temp. Последний вход влияет на упомянутые ранее зависимые от температуры параметры. Внутри блока используется таблица поиска для каждого из этих параметров с использованием Temp в качестве входных данных. Выходными сигналами блока являются ток якоря, эффективный крутящийся момент нагрузки, создаваемый машиной, а также скорость вращения и угловое положение вала.
Гидравлический насос
Аксиально-поршневой насос состоит из трех основных компонентов: корпуса, содержащего поршни, крышки насоса и опрокидывающейся пластины [6]. Угол опрокидывающейся пластины определяет рабочий объем насоса и может быть переменным или фиксированным. На насосе Gen V. опрокидывающаяся пластина является угловым упорным подшипником с фиксированным углом. Ствол удерживается у крышки насоса, содержащей всасывающее и нагнетательное отверстия. Расположение этих портов таково, что всасывающий патрубок подключен к стороне низкого давления системы, а выпускной патрубок – к стороне высокого давления. При вращении ствола поршни скользят вдоль опрокидывающейся пластины. Угол опрокидывающейся пластины заставляет поршни совершать возвратно-поступательные движения вперед-назад, что создает насосное действие, то есть всасывание жидкости со стороны низкого давления, испускание ее со стороны высокого давления.
Поперечное сечение опрокидывающейся пластины, ствола, поршней и крышки насоса:
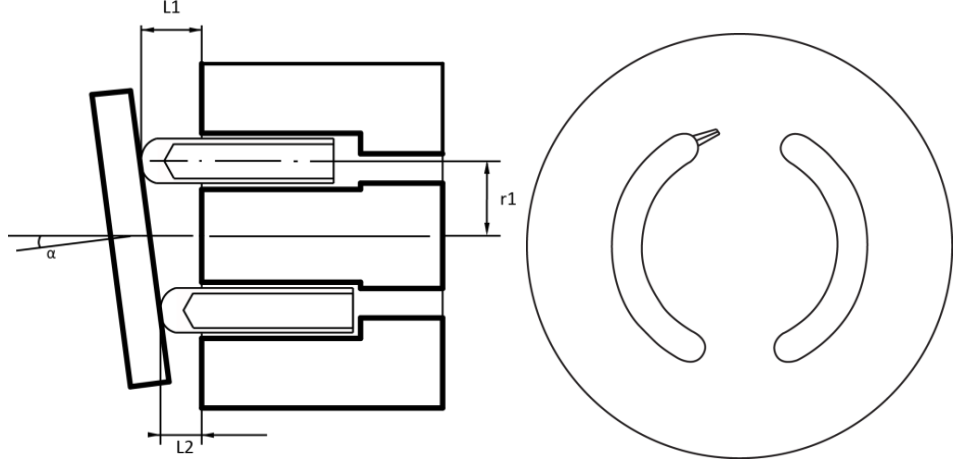
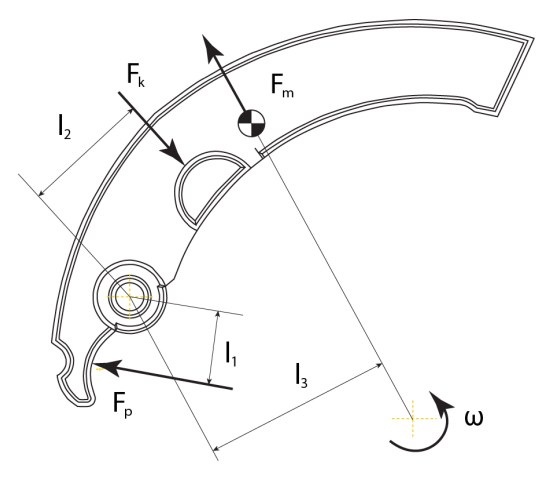
Как упоминалось во введении, насос является машиной, создающей поток. Этот поток создает давление в камере сцепления. Как только желаемое давление достигается в муфте, поток, создаваемый насосом, требует альтернативного пути, иначе оно продолжит наращивать давление. Центр ствола насоса Gen V является полым, и жидкость под давлением может достигать этой камеры. Из этой камеры три просверленных канала выводят жидкость на поверхность ствола. На поверхности находятся три плеча-рычага, вращающихся вместе со стволом. Они предназначены для управления открытием и закрытием канальных отверстий. Если скорость вращения достаточно высока, центростремительная сила поворачивает рычаг и толкает шарик, расположенный на его более коротком конце, в выпускное отверстие, тем самым закрывая его. Когда давление в камере повышается, сила жидкости вызывает вращательное движение в противоположном направлении от центробежной силы. Это открывает выпускное отверстие и позволяет утекать в окружающую систему. Плечи также действуют как обратные клапаны, когда накачка прекращается, высокое давление в системе поднимет плечи, создавая таким образом высокий поток через отверстия канала и вызывая быстрое падение давления.
Положение поршня
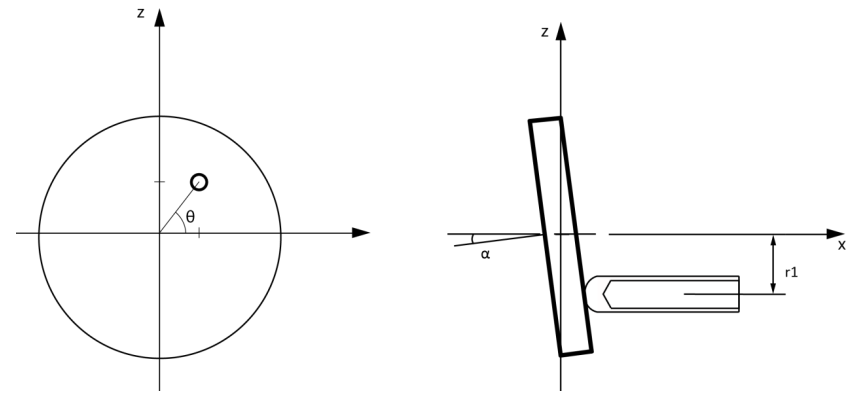
Для точного учета сил, действующих на поршень, необходимо установить систему координат для цилиндра насоса, опрокидывающейся пластины и положения поршня. Определенная плоскость x, y, z имеет ось x в направлении вала машины постоянного тока. Система координат.
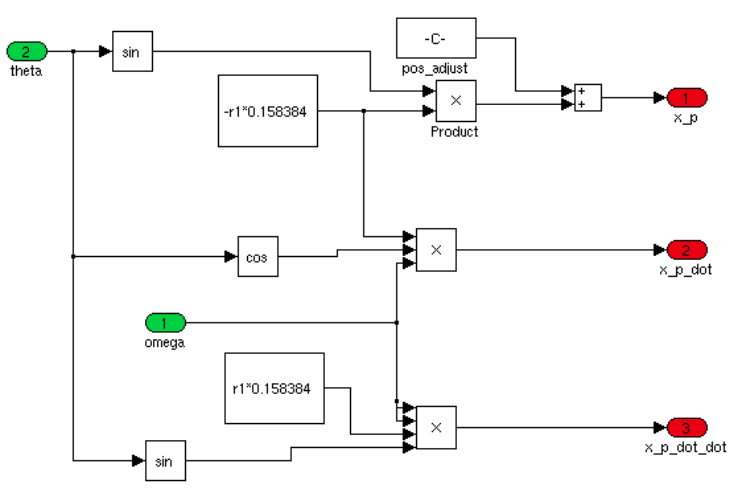
Изучая схему, можно определить осевое положение поршня:

где r1 – радиус от центра ствола до поршней, а α – угол наклона шайбы. Это дает позицию, которая колеблется между положительным и отрицательным значением. Затем добавляется константа pos_adj, чтобы сбалансировать позицию, равную нулю в BDC. Поскольку для расчета действующих на поршень сил понадобятся скорость и ускорение, это получается.

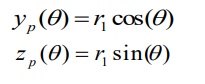
Координаты y и z просты:
Поршневые силы
Составив уравнение равновесия системы, можно определить силы, действующие на нее. Установлено уравнение равновесия в направлении х.

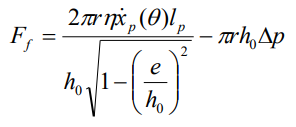
Сила трения из-за вязкости в цилиндре, когда поршень движется внутри, определяется следующим уравнением. Основными параметрами, управляющими этим уравнением, являются вязкость η, средний зазор между поршнем и цилиндром h0 и скорость поршня px.
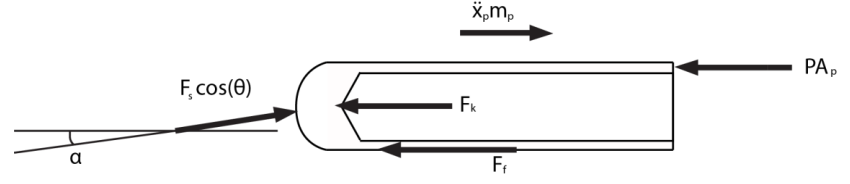
Усилие по направлению z можно рассчитать как функцию осевого угла. Предполагается, что силы реакции ствола на поршень расположены в самой внутренней части поршня и в точке, где поршень выходит из ствола. Составив уравнение равновесия поршня, можно установить уравнение момента.

Силы, действующие на поршень в направлении z:
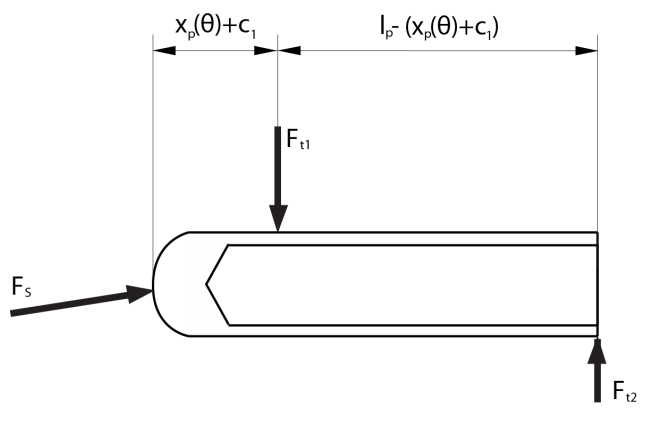
Выходит:
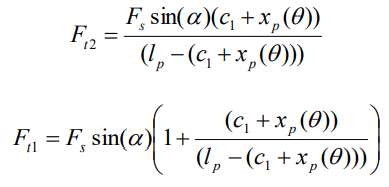
Эти силы Ft1 и Ft2 будут использованы для расчета потерь через трение в поршневой камере.
Уравнение силы пружины:
После перестройки уравнения получаем выражение для силы, действующей на опрокидывающуюся пластину:
Рычаг
Целью этого раздела является вычисление потока, выходящего через отверстие в рукавах. Этот поток регулируется площадью отверстия в конце канала. Эта область, в свою очередь, регулируется Δy1, являющейся высотой между отверстием и шариком на конце рычажного плеча. Уравнение равновесия для плеча проиллюстрировано с помощью отверстия для шпильки как центра вращения:
Эти силы заданы:
где Ab зависит от высоты между выпускным отверстием и шаром. Чтобы сделать все уравнения зависимыми от этой высоты, формируем следующие упрощения и соотношения:
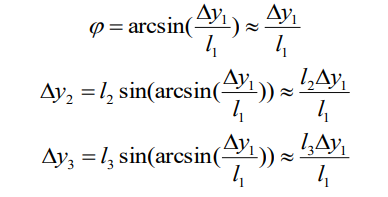
Упрощение уравнений объясняется небольшими изменениями угла, которые будут происходить во время работы:
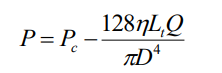
Хаген-Пуазей
Хаген-Пуазейль описывает ламинарный поток несжимаемой жидкости в трубе. Используя это уравнение потока, можно рассчитать падение давления в канале, ведущее к отверстию. Допуская известный поток Q и геометрию канала, поток Хагена-Пуазейля с нашими обозначениями станет:
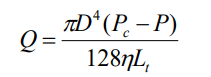
где η – вязкость, D – диаметр трубы, Lt – длина трубы, Pc и P – разные давления . Это можно изменить на:
Сечение напорного канала в стволе насоса:
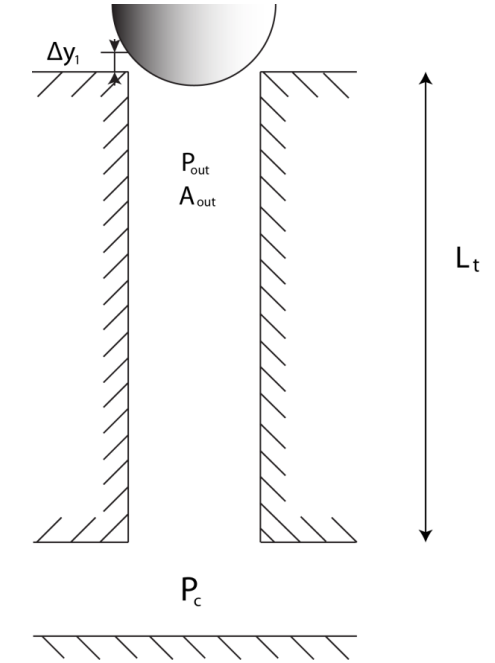
Уравнение потока
В конце концов это приводит к уравнению потока. Поток через отверстие определяется следующим образом:
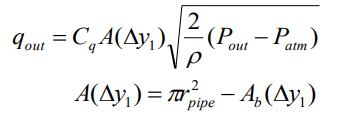
Момент нагрузки на двигатель
Общий крутящий момент нагрузки, действующий на вал двигателя, состоит из четырех различных крутящих моментов: вязкого крутящего момента Tv, вызванного движением жидкости в насосе, крутящего момента трения в подшипниках и других движущихся друг против друга Tf частей и крутящего момента , вызванного инерцией. TI. Все это зависит от скорости вращения или ускорения вала.

Проиллюстрировано уравнение равновесия для крутящего момента вокруг вала двигателя. Вклад сил поршня в общий крутящий момент Ts описывается:

где α – угол наклона пластины, а длина плеча описывается r1cos(θ) .
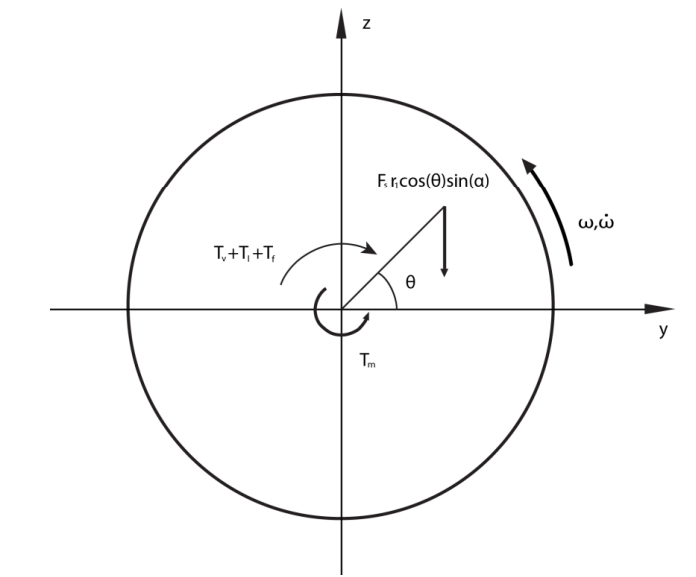
Момент трения в упорном осевом подшипнике рассчитывается в соответствии с эмпирическими соотношениями, предоставленными SKF, и определяется по формуле:
Крутящий момент из-за вязкости Tf, поскольку для него невозможно найти эмпирические соотношения, оценивается как функция скорости вращения и ускорения. Инерция IP подшипников, ствола и поршней была рассчитана с помощью системы CAD и было задано постоянное значение. Уравнение для этого взноса определяется как:
Поршневое течение и истоки
Когда ствол начинает вращаться, поршни вынуждены совершать возвратно-поступательные движения вперед и назад, создавая действие накачки. Идеальный поток, который может обеспечить один поршень, описывается уравнением:
Утечка течет в насосе:
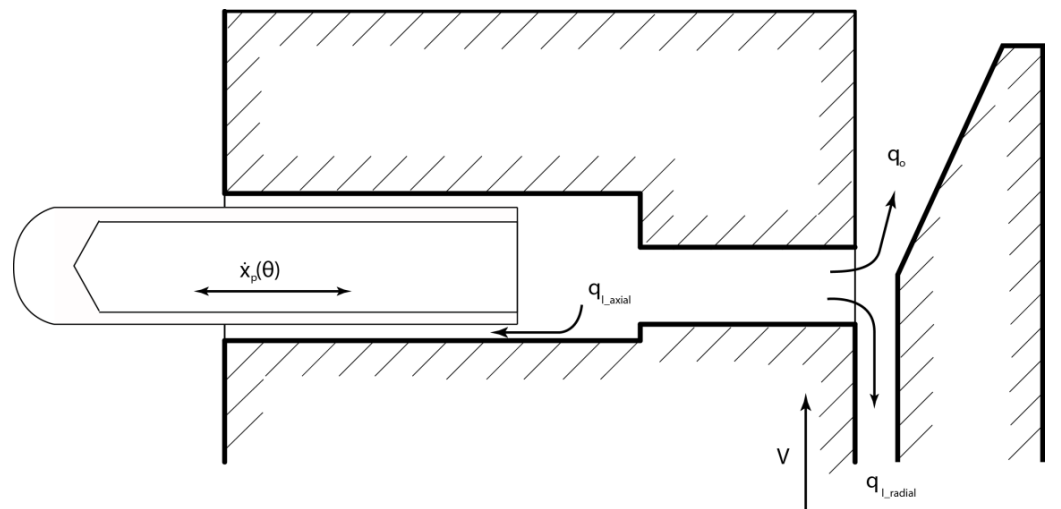
Все гидравлические насосы имеют внутренние утечки. Чтобы учесть эти внутренние потери, вводится утечка в осевом направлении между поршнем и цилиндром, а также утечка в радиальном направлении.
Эксцентриситет e поршня считается равным нулю, поэтому уравнение можно упростить так:
Чистый поток насоса теперь можно описать уравнением:

Пакет сцепления и давление в системе
Существует эластичность создаваемого в муфте давления. Различные пакеты сцепления имеют разную эластичность в зависимости от привода, корпуса муфты, износа и количества используемых дисков. Потому динамика пакета сцепления должна быть включена в модель.
Haldex провела серию тестов, чтобы установить соотношение упругости, подняв давление на пакет сцепления и измерив объемное расширение. Эти измерения содержат общую характеристику, включая упругость масла. Данные об упругости, использованные в этом моделировании, базируются на характеристиках пакета сцепления, разработанного для Volkswagen. Определенный объем гидравлической жидкости в пакете сцепления соответствует уровню давления, то есть давление в системе является функцией объема. Поток интегрируется во времени, представляя таким образом объем, и используется как входные данные для таблицы поиска, содержащей данные эластичности. Выходным сигналом является давление в системе, которое затем возвращается к модели.
Модель Simulink
Модель Simulink насоса разделена на три подсистемы. Сначала рассчитывается положение поршня, ускорение и быстрота. Они отправляются в блок, где рассчитывается нагрузка на вал двигателя, а также блок, который вычисляет поток из насоса.
Читайте также как проверить уровень масла в муфте Haldex .
Гидравлическая жидкость
Поскольку модель должна работать в широком диапазоне температур, свойства гидравлической жидкости становятся существенными. Моделируемые свойства это плотность, вязкость и объемный модуль. Поскольку были доступны измерения плотности, плотность моделируется как функция температуры, даже если гидравлическую жидкость можно считать несжимаемой с очень малыми вариациями плотности, как следствие. Вязкость имеет значительную температурную зависимость и аппроксимируется на основе измерений, проведенных в Haldex.
Управляющие уравнения
Свойства жидкостей очень сложны, и считается, что физика лежит вне цели этой магистерской работы. Таким образом, математическая модель основана на эмпирических соотношениях и экспериментальных данных.
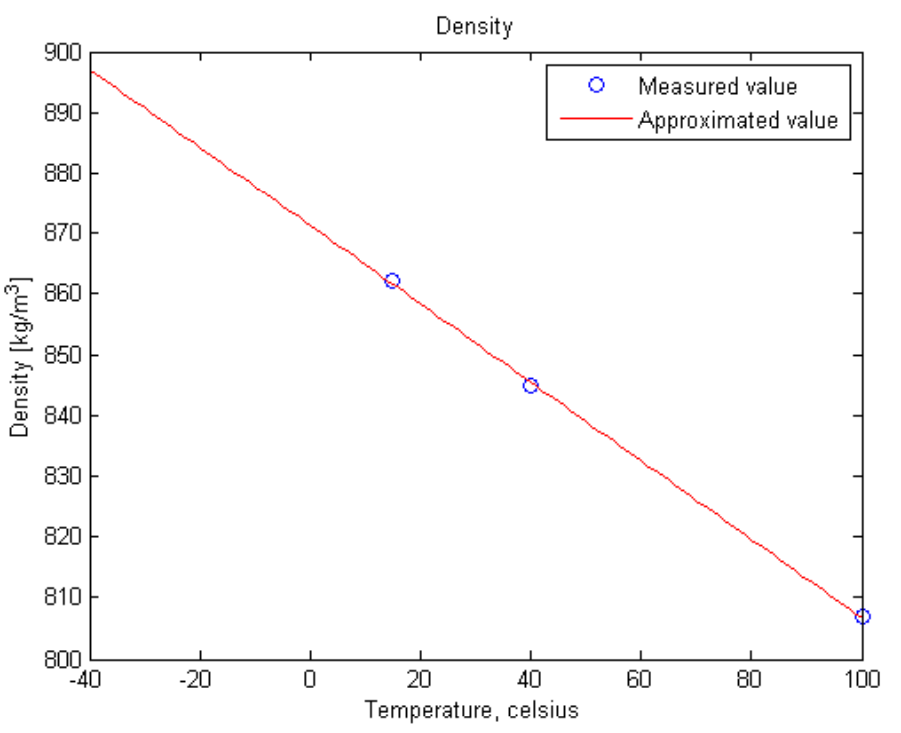
Плотность
Плотность используется для расчета динамической вязкости. Он аппроксимируется линейной функцией температуры.
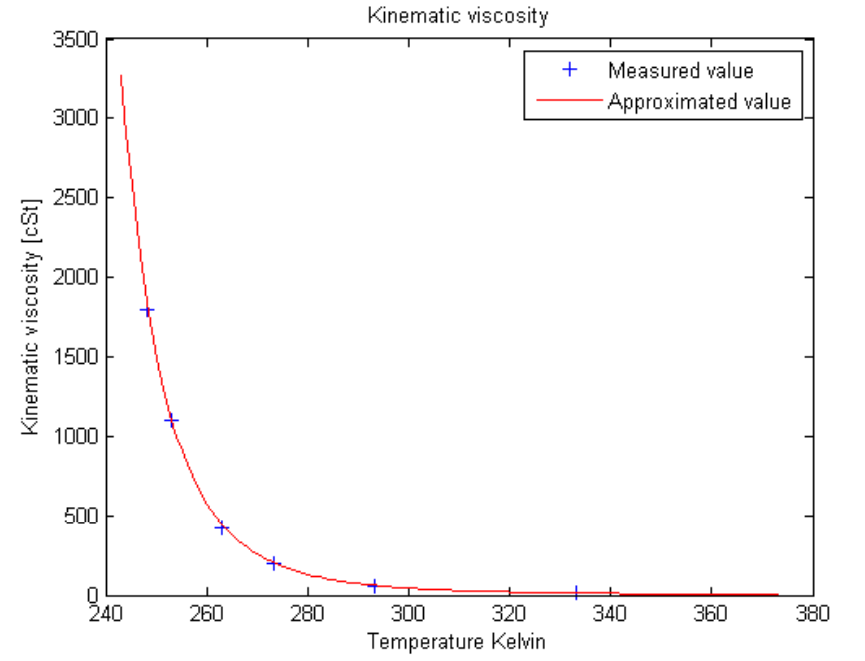
Вязкость
Вязкость является мерой внутреннего трения в жидкости и оказывает влияние на производительность гидравлического насоса. Кинематическая вязкость, ν, рассчитывается согласно соотношению:
Зная кинематическую вязкость при двух разных температурах, Tk можно определить константы A и B.
Объемный модуль
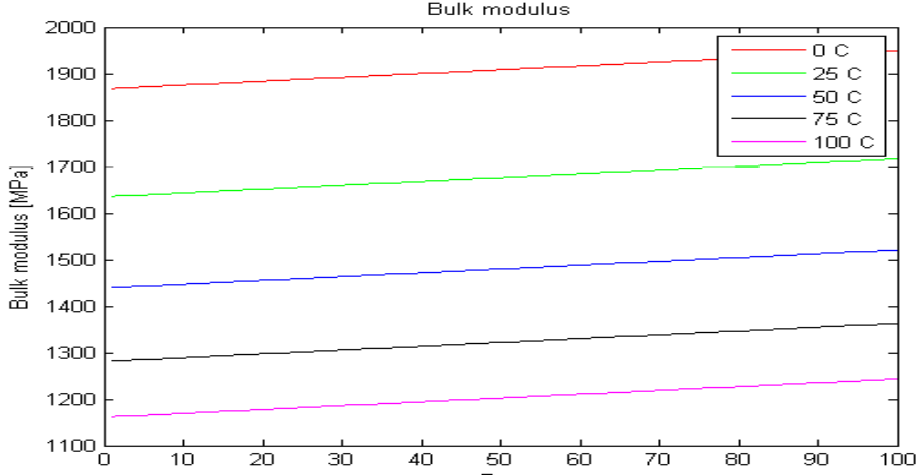
Модуль объемной упругости является мерой сжимаемости жидкости и зависит как от давления, так и от температуры. Поскольку не было доступных экспериментальных данных, объемный модуль был смоделирован в соответствии с данными, найденными Олссоном О. и Ридбергом К.Э., и аппроксимирован квадратичной функцией температуры и давления.
Решение
Решая уравнение 3.58 получают окончательное уравнение для вязкости, объемного модуля и плотности. Константы c1-c4, k1 и k2 используются для аппроксимации функции:
Завершенная модель
Общая модель
Полная модель, как и фактическое оборудование, регулируется вращением двигателя. Используя уравнение двигателя для решения угла, скорости и ускорения вала, можно определить осевое положение, скорость и ускорение каждого отдельного поршня. Затем они используются для расчета крутящего момента погрузки и потока, создаваемого каждым поршнем. Добавление этих потоков генерирует общий поток. Путем вычитания потока, выходящего через рычажное отверстие, рассчитывается общий поток в сцепление или выход из него. Этот поток используется для оценки количества жидкости внутри муфты, которая, в свою очередь, используется для расчета действующего на муфту давления. Это давление является решающим фактором потока через рычажное отверстие на плечах и, таким образом, возвращается к этому уравнению.
Модель Simulink
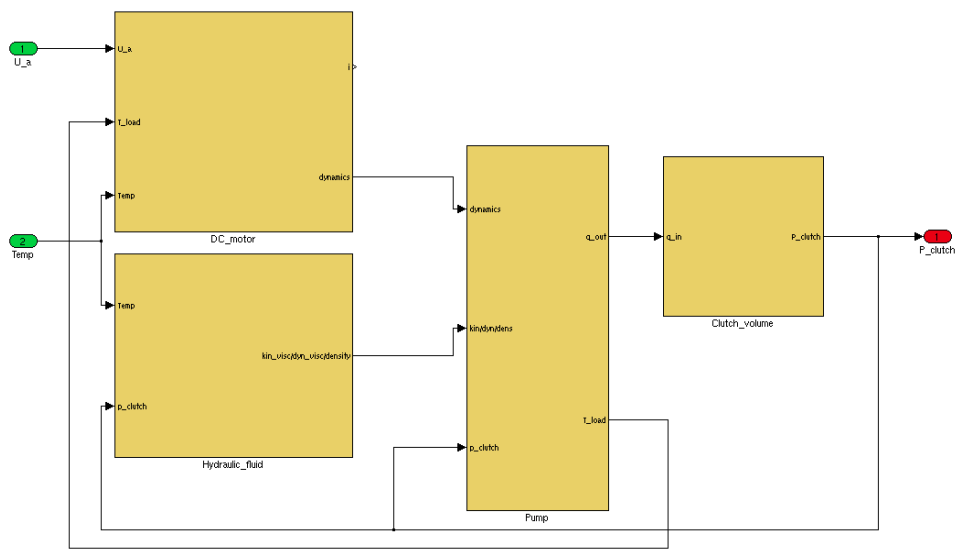
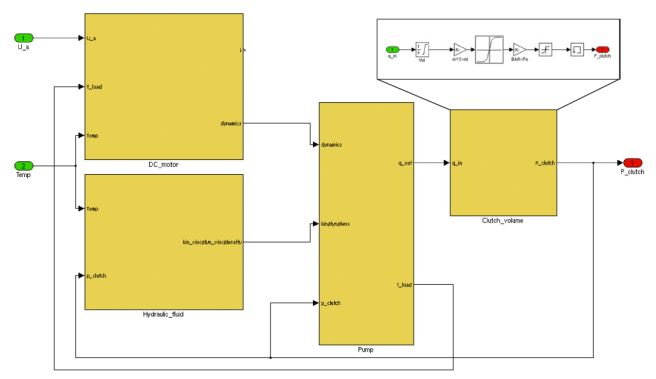
Полная модель Simulink разделена на четыре подсистемы: двигатель, насос, динамика гидравлической жидкости и одна описывающая давление.
Результаты и подтверждения
DC-машина
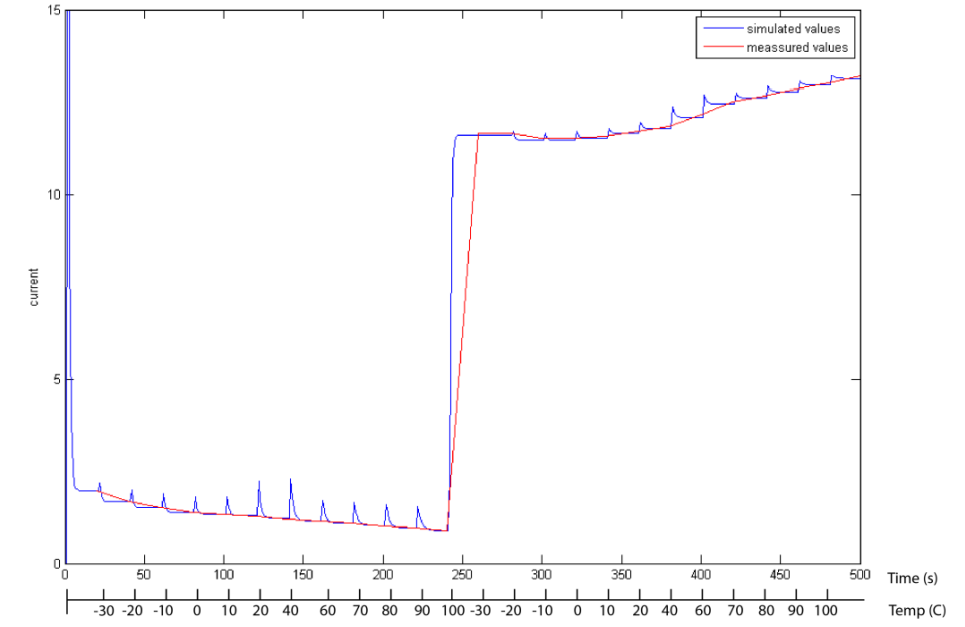
Модель MATLAB/SIMULINK проверяется на данные, предоставленные изготовителем. Поскольку нет доступных динамических данных, модель проверяется только на статическое поведение с постоянным напряжением питания в вольтах. В первых образцах двигатель работает без внешней нагрузки с повышением температуры от –3 до C. Затем двигатель нагружается постоянным крутящим моментом 20 Нсм, а затем температура снова снижается до –30 градусов.
Ток якоря, в DC-машине, вначале без нагрузки от –30 до 100 град. После 245 проб приложили нагрузку и температуру снизили от 100 до -30 градусов.
Скорость вращения вала машины постоянного тока под погрузкой и без нагрузки от -30 до 100 градусов:
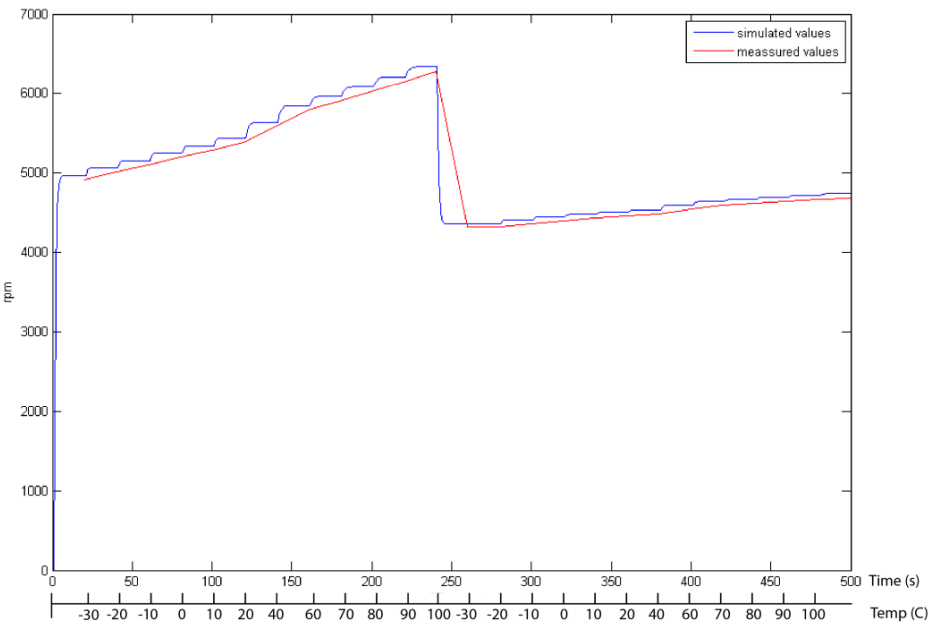
Симуляции показывают хорошую согласованность с цифрами, предоставленными производителем двигателя. Однако следует отметить, что эти цифры, предоставленные производителем, имеют расхождение в 8%. Изменение констант двигателя, по-видимому, повлияет на работу модели.
Гидравлический насос
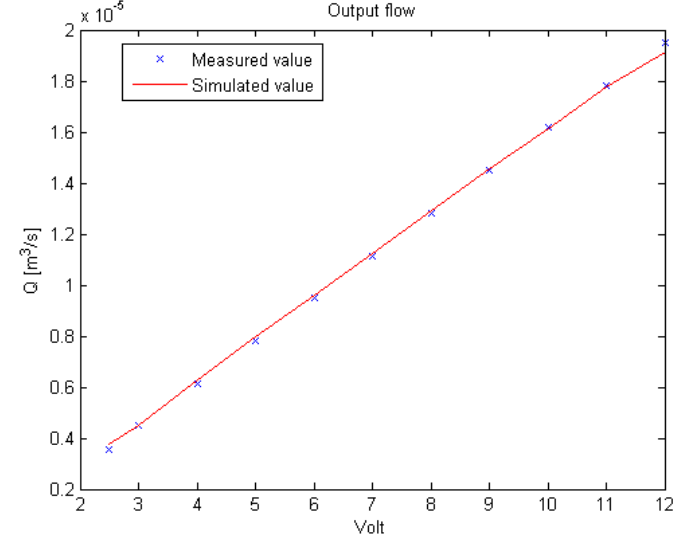
Компания Haldex провела экспериментальные измерения полезного расхода насоса. Несмотря на то, что эти измерения сугубо статичны, они все равно подтверждают правильность смоделированных статических потоков.
Измеренные и смоделированные статические потоки от гидравлического насоса:
Гидравлическая жидкость
Кинематическая вязкость аппроксимируется логарифмической функцией на основе измерений, проведенных Haldex. Однако, поскольку измерения были доступны, а плотность используется для вычисления динамической вязкости, функция жизненно важна. Функция объемного модуля реализована в MATLAB/Simulink, но практически не используется в текущей модели. В основном это связано с двумя вещами. Когда был введен показатель упругости в LSC, сжимаемость масла уже была включена в измерение. Другая причина состоит в том, что гидравлическая система считается полностью свободной от воздушной смеси. Поэтому гидравлическую жидкость можно считать несжимаемой, и по сравнению с механической жесткостью у LSC это оказало бы влияние на результат. Однако авторы этой диссертации намеренно не удалили эти блоки из модели. Если обстоятельства изменятся в будущем, они могут быть полезны.
Кинематическая вязкость как функция температуры:
Плотность как функция температуры:
Объемный модуль как функция температуры и давления:
Завершенная модель
Измерения производились с помощью испытательного стенда с фактической системой. С этой установки регистрируется приложенное напряжение, результирующий ток якоря и давление. Также регистрируются температура масла и время. Затем данные используются для сравнения с моделью. Ниже приведены пошаговые ответы и изменения. Наконец, один сеанс, где приложенное напряжение ближе к рабочей ситуации, сравнивается с симуляцией.
Шаги
Выполняется ряд шагов в течение всего рабочего интервала. На следующих рисунках измеряется погрешность между фактическим давлением и смоделированным.
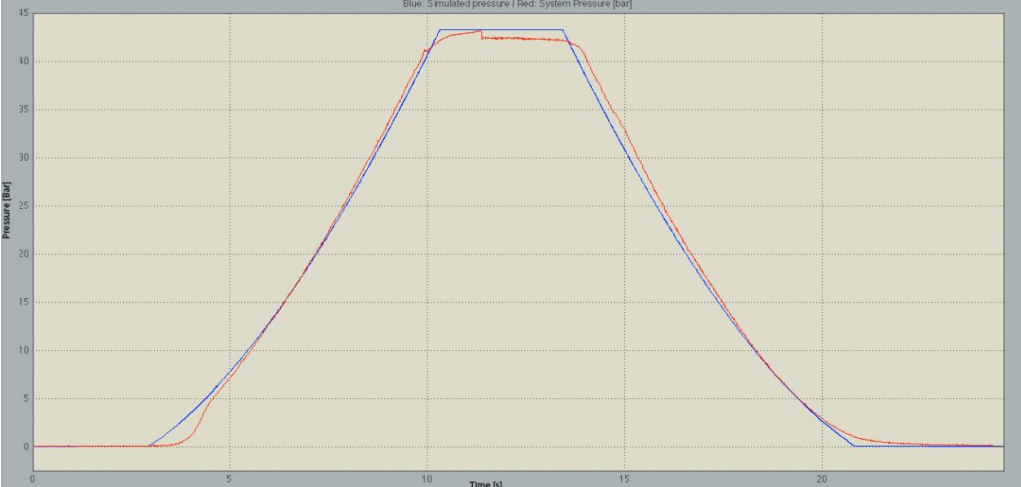
- Измеренное давление (красное) и имитированное давление (синее):
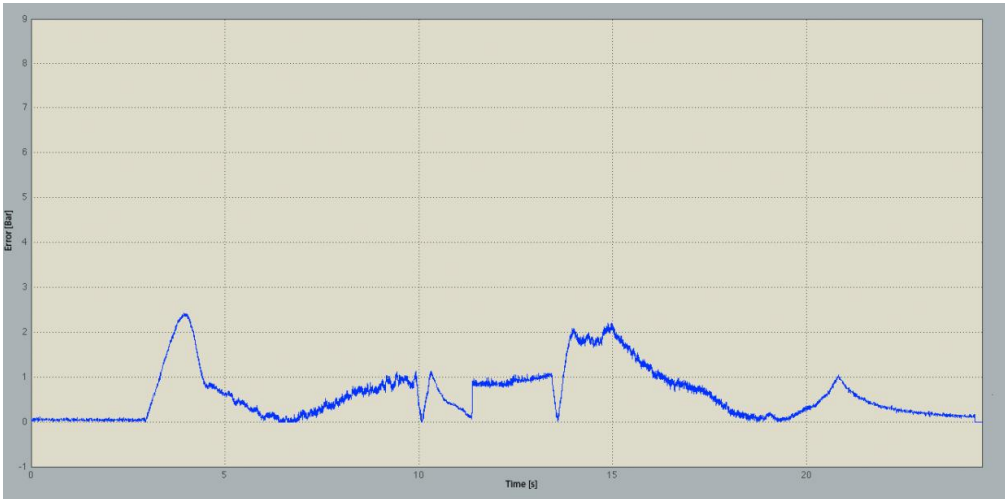
- Ошибка давления:
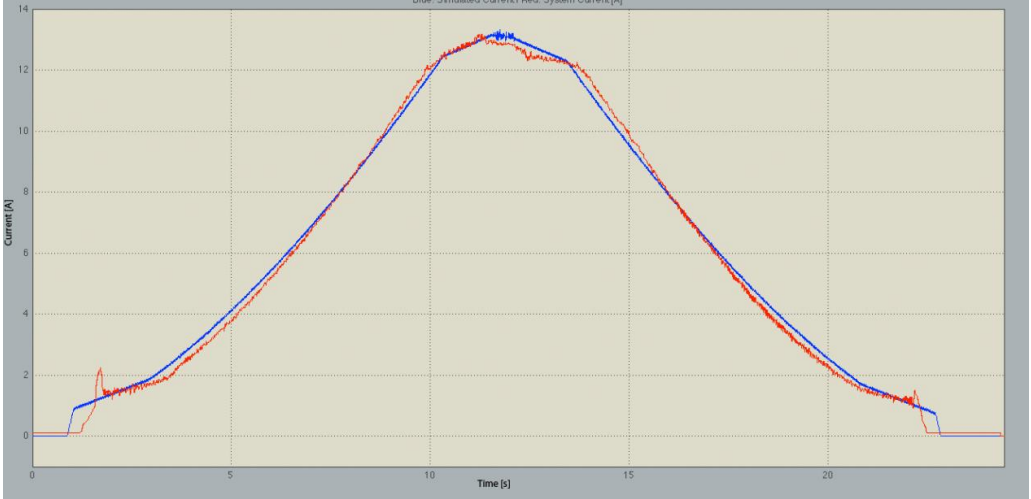
- Измеренный ток (красный) и имитированный ток (синий):
Эти сравнения показывают, что нарастание давления в симуляции происходит несколько быстро. Хотя, как только достигается более высокое давление, выше 5-7 бар, моделирование точно соответствует фактическим данным. Ток демонстрирует те же характеристики; при более низком крутящем моменте и давлении ток якоря не совсем соответствует, но более точен при более высоком давлении.
Рампа
При медленном повышении, а затем понижении напряжения якоря система и модель показывают следующие характеристики, изображенные в следующих рисунках.
- Измеренное давление (красное), имитированное давление (синее):
- Ошибка между фактическим и смоделированным давлением:
- Смоделированный ток (синий) и измеренный (красный):
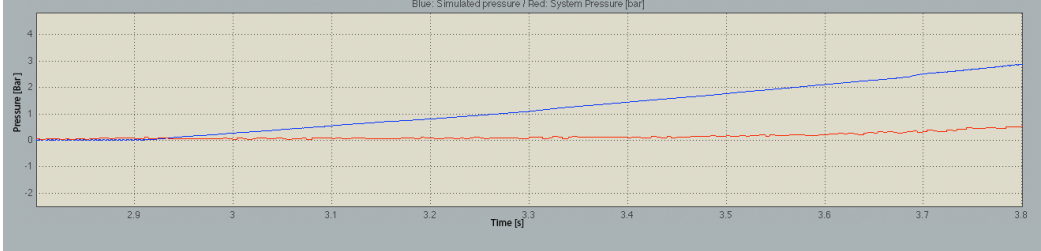
- Повышение давления, когда давление начинает расти:
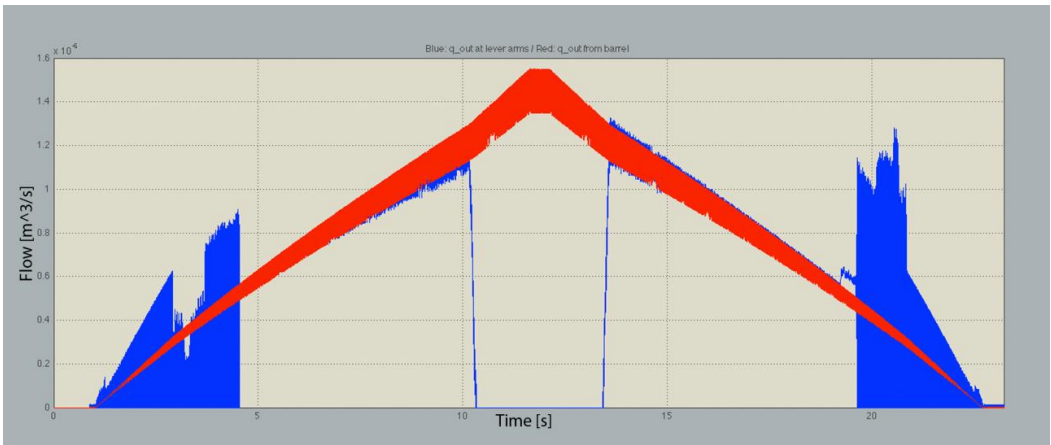
- Поток от насоса (красный) и выходящий через отверстие на плечах рычага (синий):
- Поток от насоса (красный) и выходящий через отверстия на плечах рычагов (синий) в течение полного цикла рампы:
Оперативная обстановка
Чтобы получить представление о том, как хорошо модель соответствует реальной оперативной ситуации, на платформе был выполнен третий запуск. Целью было имитировать ситуацию, когда автомобиль буксует на льду или снегу. Такая ситуация была зафиксирована путем случайного изменения напряжения, подаваемого на двигатель, чередуя высокую и низкую частоты. Погрешность в давлении и текущие сравнения также представлены ниже.
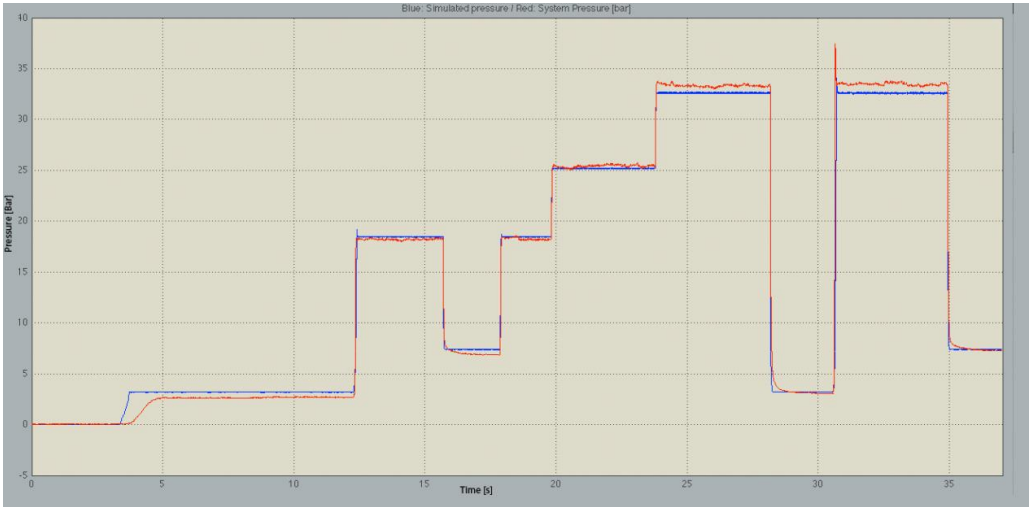
- Измерение давления. Измеренное давление (красное) и смоделированное давление (синее):
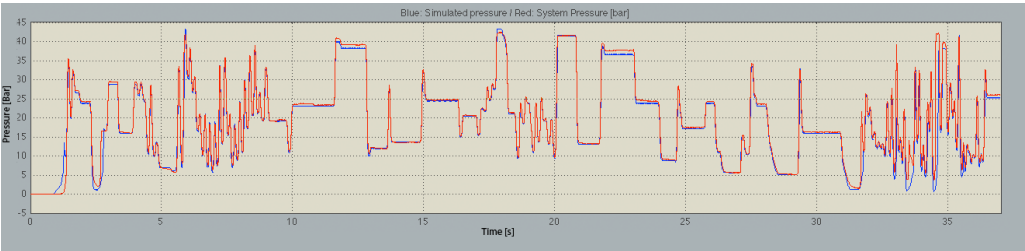
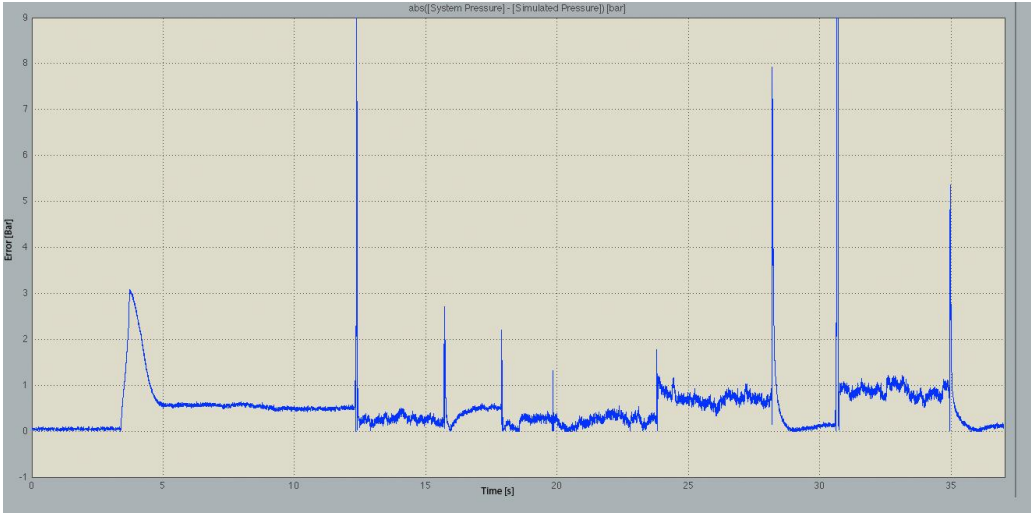
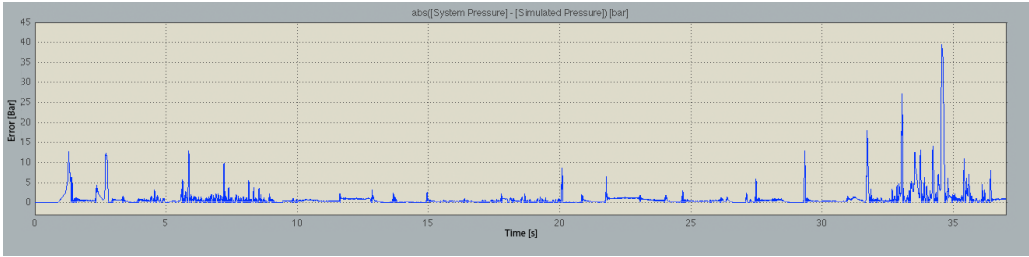
- Погрешность между измеренным и фактическим давлением:
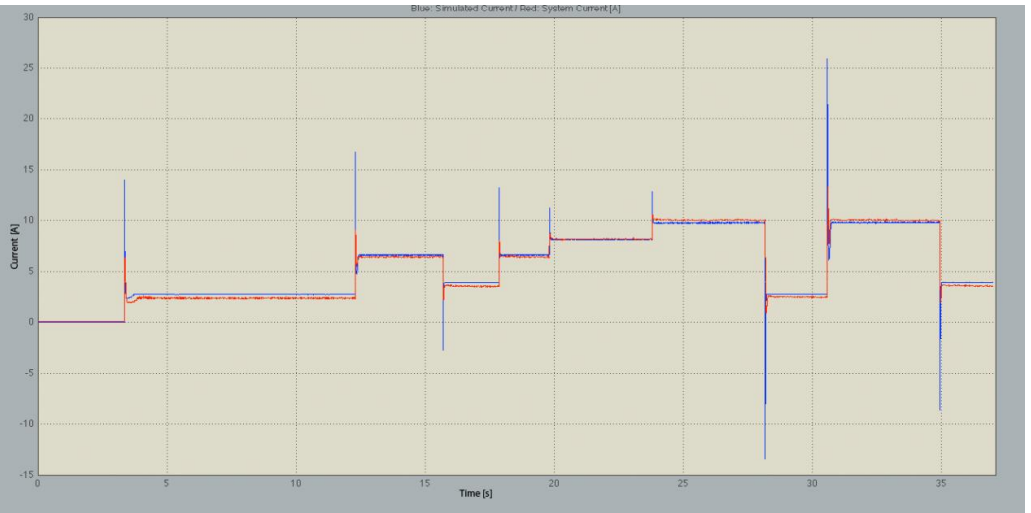
- Ток во время работы. Измеренный (красный) и смоделированный (синий):
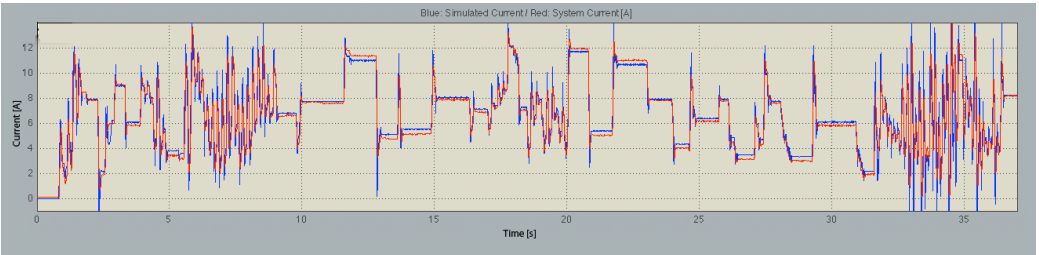
Неудивительно, что это моделирование демонстрирует те же характеристики, что и в предыдущих моделированиях. При низком давлении, особенно при запуске, симуляция выполняется быстрее, чем фактическая система. В этом разделе будут рассмотрены точность модели, а также исследования и сравнения входных/исходных данных полной модели. Также будут обсуждаться возможные области, вызывающие ошибки.
Точность модели
Чтобы определить точность модели, было подробнее изучено два вышеперечисленных моделирования: рампу и оперативную ситуацию. Процент погрешностей между измеренным и смоделированным током и давлением был зарегистрирован. Данные из этих симуляций были отсортированы по напряжению якоря и была рассчитана средняя погрешность в регионе работы.
- Текущая ошибка моделирования рампы:
- Ошибка давления в моделировании рампы:
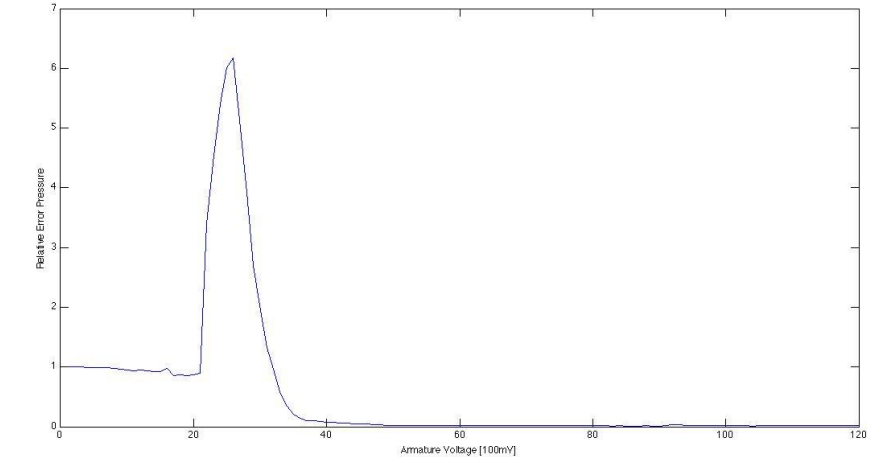
Цифры выше взяты из цикла испытаний на рампе. Как видно на этих рисунках, погрешность больше, на самом деле очень велика, при более низких напряжениях. Это согласуется с предварительными результатами, но может ввести в заблуждение. Абсолютная погрешность очень мала при более низких напряжениях, примерно 0,05 бар. Также выполняется более тщательный анализ относительной погрешности.
- Относительная погрешность давления при моделировании рампы:
- Относительная погрешность тока при моделировании рампы:
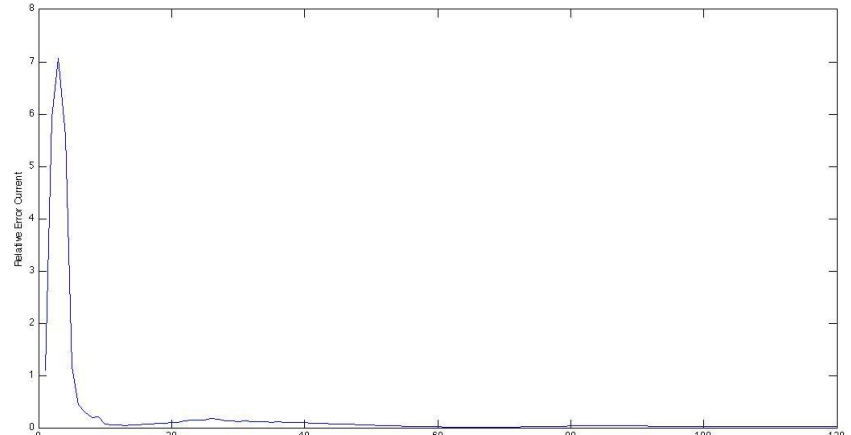
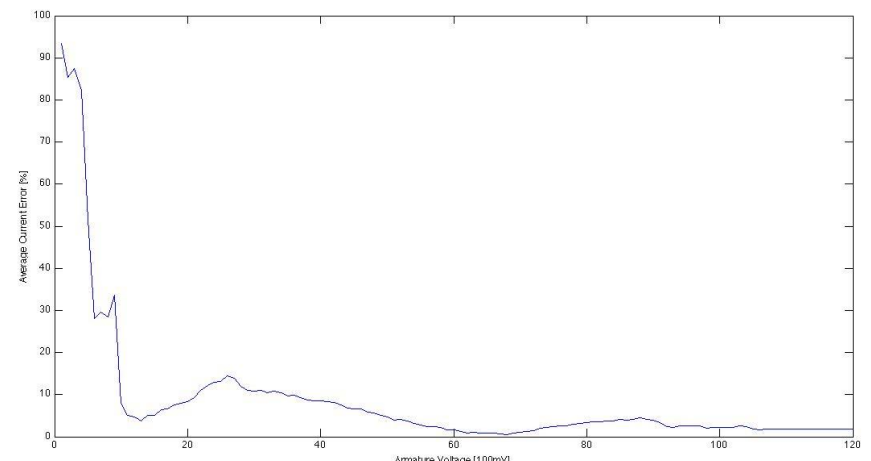
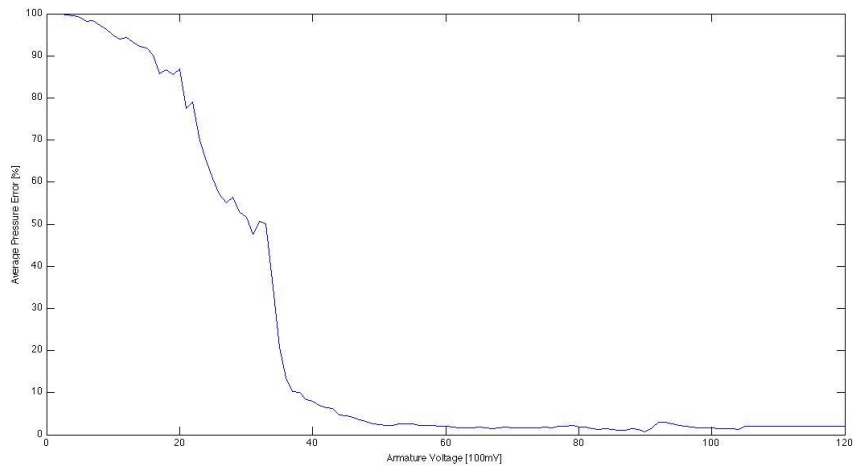
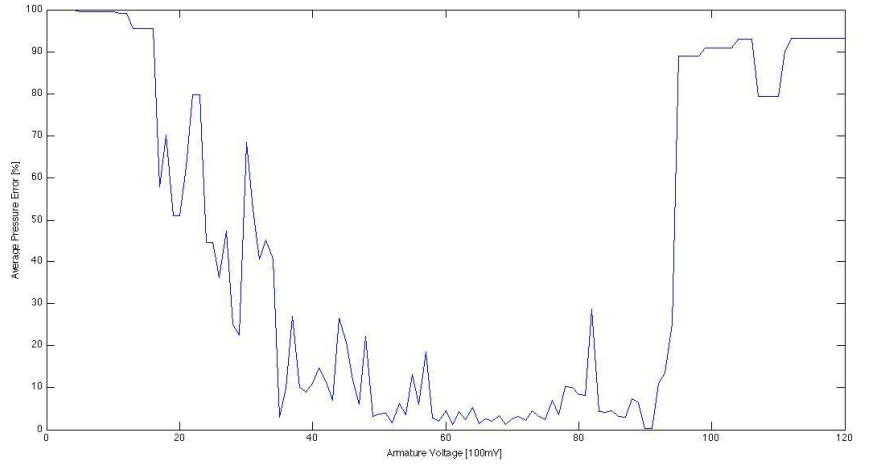
Оперативная обстановка показывает похожую ситуацию как пандус. При более низких напряжениях процент ошибок больше, чем и при более высоких напряжениях. В средней области погрешность гораздо меньше, в следующем разделе будет обсуждено почему.
- Процент ошибки давления при рабочей ситуации:
- Текущая погрешность в процентах при рабочей ситуации:
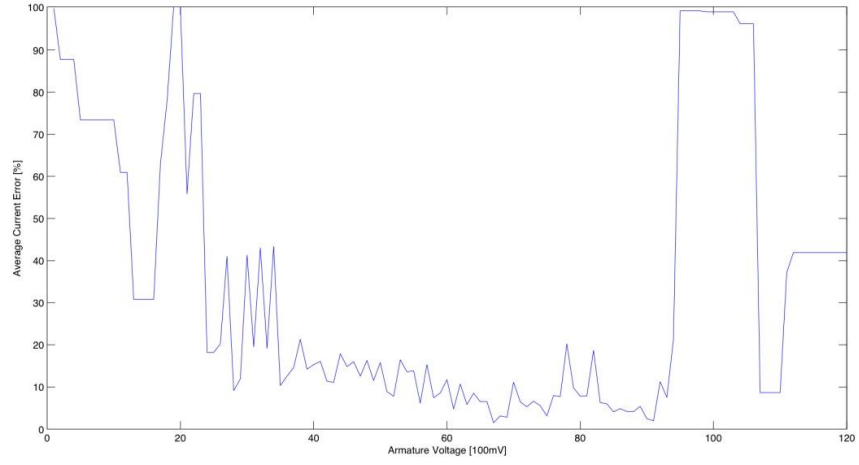
Возможные причины ошибки
Основная причина больших погрешностей в процентном соотношении при более высоких напряжениях в рабочем цикле состоит в том, что напряжение редко достигает этих высоких значений при моделировании, и то лишь в высокочастотных областях. Это наказывает модель, которая работает немного медленно или немного быстро, создавая большие ошибки. Кроме того, что касается тока, большие переходные процессы возникают при моделировании, когда происходят изменения напряжения. Эти переходные процессы, скорее всего, также происходят в реальном двигателе, но из-за относительно низкой частоты дискретизации они не будут записаны. Ниже представлено несколько более детальных анализов результатов моделирования оперативной ситуации.
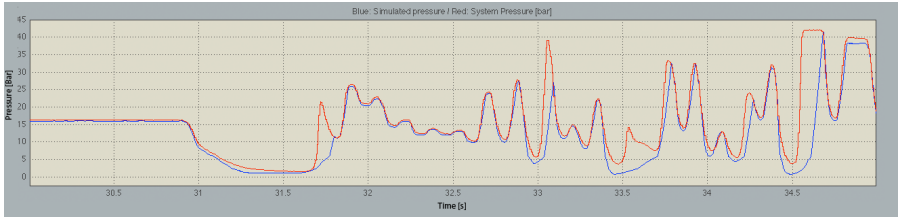
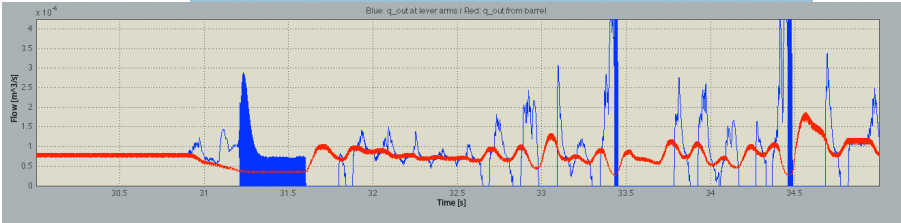
- Крупный план давления в интервале между 30 и 35 секундами:
- Увеличенное изображение потоков от насоса и рычагов в течение периода 30-35 секунд моделирования:
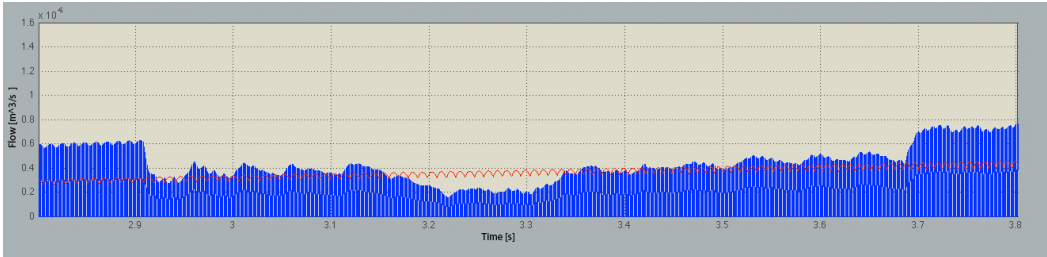
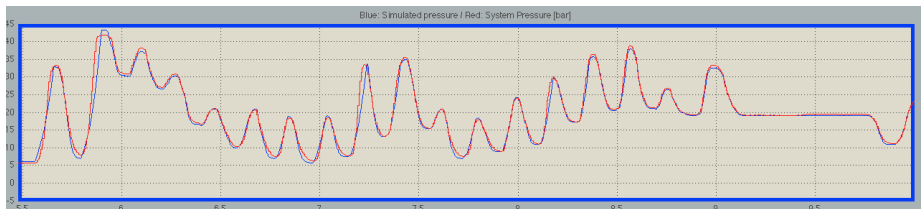
- Увеличенный интервал времени, где смоделированный результат хорош. На горизонтальной оси отложено время [с], на вертикальной оси давление:
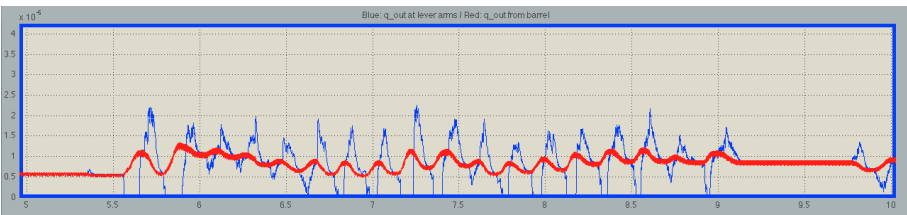
Увеличенное изображение потоков с тем же интервалом, что и выше. На горизонтальной оси отложено время [с], на вертикальной оси - поток [м3/с]:
Такое поведение уравнения потока может быть источником ошибки, но функция эластичности может способствовать ошибкам. Поскольку функция базируется на статических измерениях, изменения в объеме примыкающего к сцеплению отсека, вызванные подвижными частями, не учитываются. Если громкость изменяется, изменяется и поведение функции, что может объяснить ошибки, наблюдаемые в начале функции изменения.
Вывод
Моделирование на машине постоянного тока показывает хорошую согласованность со значениями, предоставленными производителем двигателя Buhler. Учитывая, что эти константы двигателя имеют значительную дисперсию, можно заключить, что настройка этих значений у модели может достичь еще лучшего результата. Смоделированные потоки насоса в значительной степени соответствуют измерениям Haldex. В зависимости от температуры функции вязкости и плотности масла хорошо сравниваются с измерениями жидкости. Была создана функция объемного модуля, но позже ее отказались, поскольку она не требовалась в текущей модели. Однако эта функция была сохранена в реализации Simulink на случай дальнейшего развития эластичности. Сравнение полной модели Gen V с измерениями тестовой конфигурации тоже показывают хорошие результаты. Измерение ступенчатой реакции, изменения напряжения и случайного напряжения указывают на одинаковый результат. Когда достигается более высокое давление, модель очень тщательно следит за этими измерениями. Когда модель создает давление от нуля или очень низкого давления, она отличается от тестов. Существует предположение, что этот слишком быстрый рост давления связан либо с неопределенными областями в квадратном уравнении, управляющем рычагами насоса, либо с ошибками в функции упругости, либо с обеими причинами.
Как проверить уровень масла в муфте Haldex - читайте здесь .
Модель Simulink
1. Завершенная модель . Модельный блок содержит четыре подсистемы; блок двигателя постоянного тока, блок расчета динамики гидравлической жидкости, блок насоса и блок объема сцепления.
2. Двигатель постоянного тока . Блок вычисляет уравнение двигателя, описанное в разделе 8. Входными данными для блока являются напряжение u_a и крутящий момент нагрузки T_load. Подпрограммы переключателей выводят ноль, пока скорость вращения вала равна нулю. Это делается для предотвращения вращения двигателя назад при нулевом напряжении.
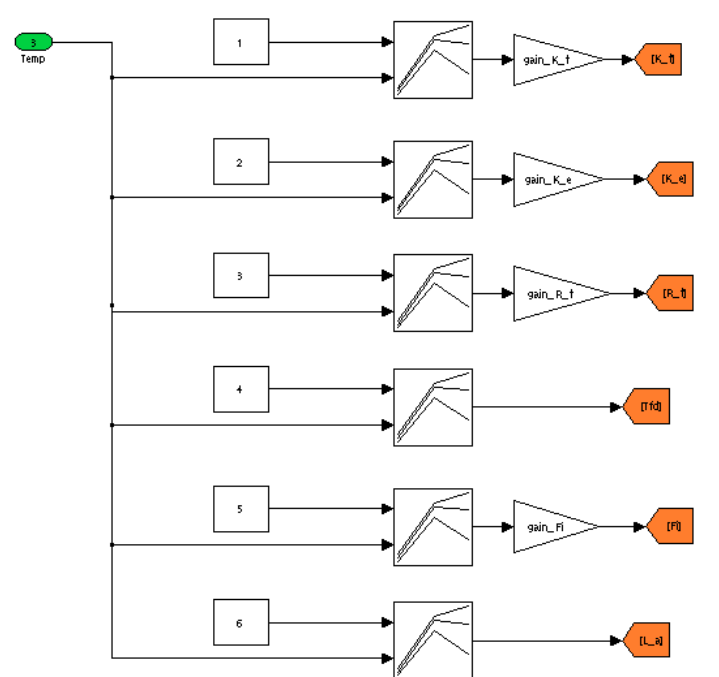
3. Параметры двигателя постоянного тока . Параметры двигателя содержатся в таблицах поиска. Эти таблицы расположены в блоке DC_motor и имеют temp как входные данные. Эти параметры делают двигатель зависимым от температуры. Коэффициенты k_t, K_e, R_t и Fi существуют для того, чтобы конвертировать их из предоставленных единиц в единицы SI
4. Объем сцепления . Блок содержит интегратор, представляющий объем. Это насыщенно, чтобы предотвратить достижение отрицательных значений. Поисковая таблица содержит упругость сцепления. Выход – это давление, действующее на сцепление.
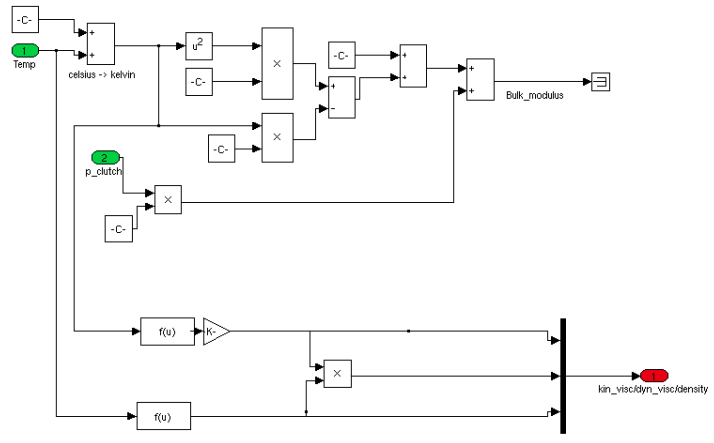
5. Гидравлическая жидкость . Этот блок рассчитывает кинематическую и динамическую вязкость и плотность гидравлической жидкости. Поскольку они зависят от температуры и давления, P_clutch и Temp являются входами. Bulk_module также вычисляется, хотя на данный момент у модели больше нет надобности в нем, поэтому этот сигнал прекращается.
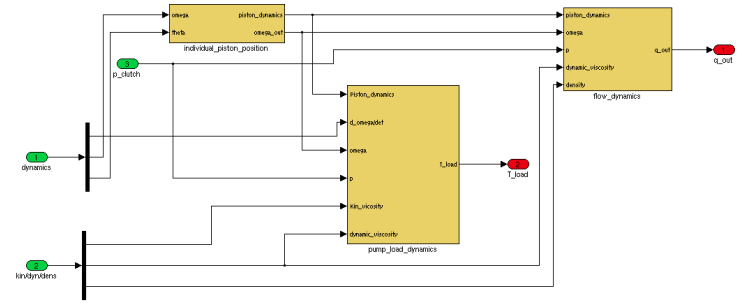
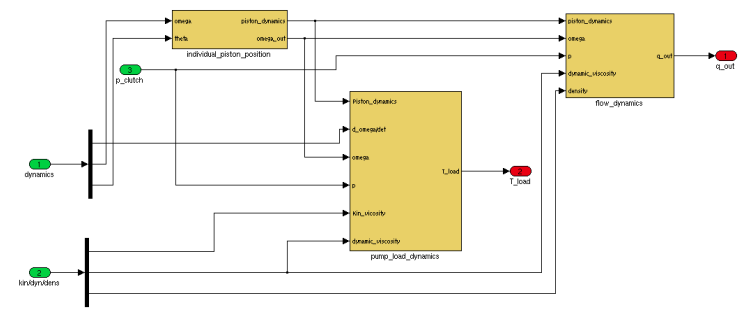
6. Насос . Насос разделен на три подсистемы. Блок individual_piston_position определяет положение, скорость и ускорение для каждого поршня, посылая их в массив под названием piston_dynamics. Блок pump_load_dynamics рассчитывает нагрузку на вал двигателя. Наконец, блок flow_dynamics представляет поток, поступающий в объем или исходящий из него рядом с поршнем муфты.
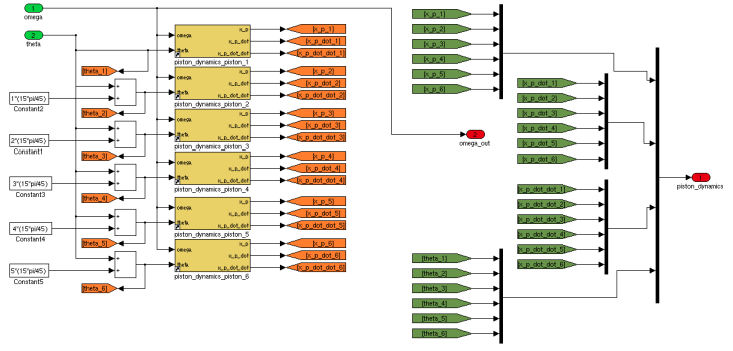
7. Индивидуальное положение поршня . Этот блок рассчитывает положение, быстроту и ускорение для каждого из шести поршней.
8. Поршневая динамика . В этой подсистеме рассчитывается положение поршня, быстрота и ускорение. Константа pos_adjust существует, чтобы сбалансировать уравнение позиции, чтобы результат всегда был положительным.
9. Динамика поршневой нагрузки . На этом блоке рассчитываются поршневые силы для каждого поршня. Затем эти силы используются для расчета момента погрузки, действующей на вал двигателя. Это частично исчисляется в тех же блоках вычисления сил, но потери в подшипниках и потери на трение исчисляются отдельно. Это разъясняется тем, что утраты в подшипнике зависят от суммы всех поршневых сил.
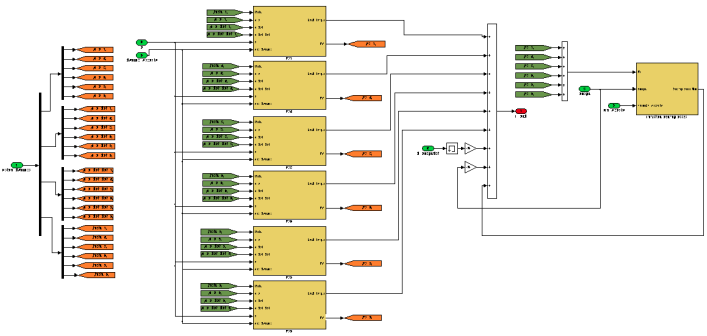
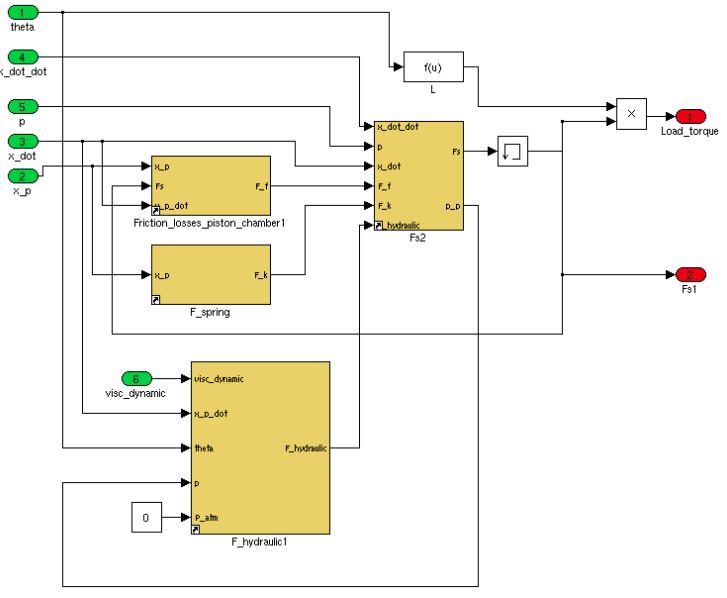
10. Fs (усилие на пластине перекоса). Этот блок рассчитывает силу F_s, силу от поршня, действующую на опрокидывающуюся пластину. Блок также рассчитывает крутящий момент нагрузки, к которому приводит эта сила. F_s также определяет потери в подшипниках и, таким образом, посылается из блока для использования в последующих расчетах. Момент нагрузки является суммой силы пружины, потерь на трение и гидравлических потерь, умноженных на рычаг L. Подсистема Fs2 суммирует эти потери и силы. Функция L вычисляет рычаг.
11. Динамика течения . Блок описывает сумму потоков, поступающих в камеру сцепления и выходящих из нее. Положительный q_out можно интерпретировать как объем, наиболее прилегающий к поршню сцепления. Отрицательное значение можно интерпретировать так, будто поток от поршней, а также объем камеры сцепления выходит через рычажное отверстие.
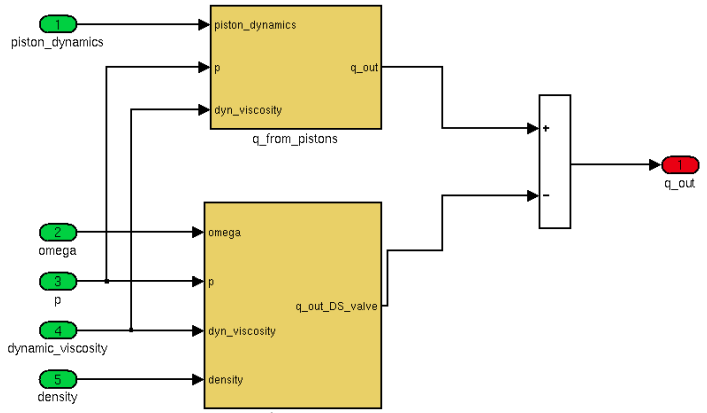
12. Поток из ствола и поток утечки . Положительный поток, то есть поток, исходящий из каждой поршневой камеры, добавляется вместе, образуя общую сумму всех этих потоков.
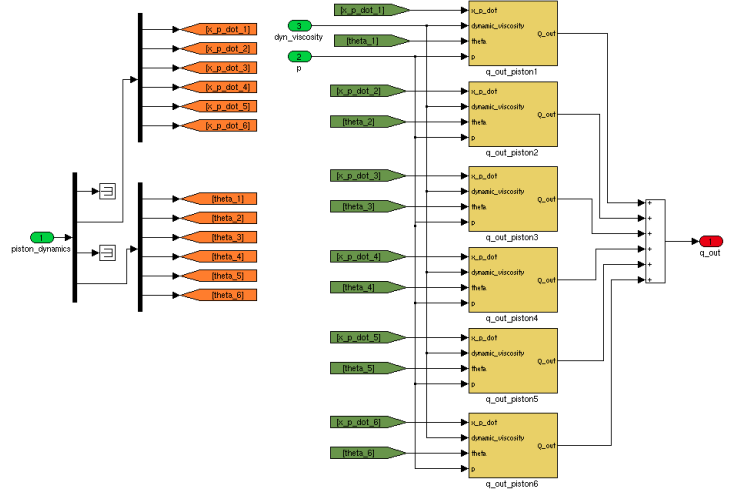
13. Поток от одного поршня . Этот блок описывает выходящий поток из одной поршневой камеры через сторону высокого давления. Уравнение потока берет площадь поршня, умножает ее на положительную скорость поршня, что создает поток. Это вычитается из потоков утечек. Блок p_switch просто переключает давление в камере в соответствии с тем, где расположен поршень, со стороны высокого или низкого давления.
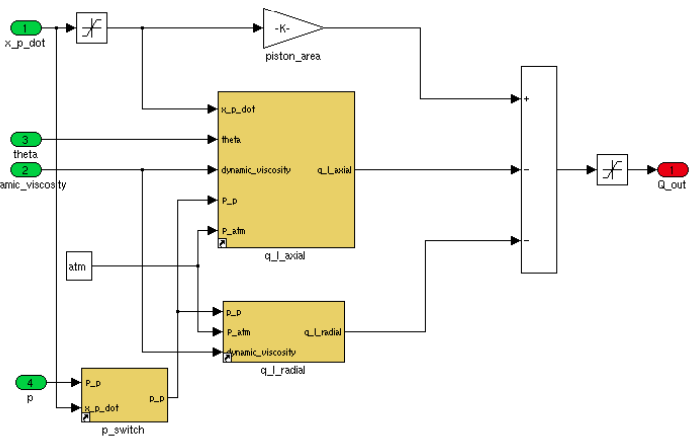
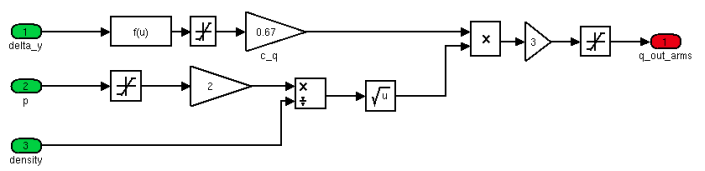
14. Поток из напорных клапанов/рычагов . Эти блоки вместе вычисляют поток через отверстия на рычагах.
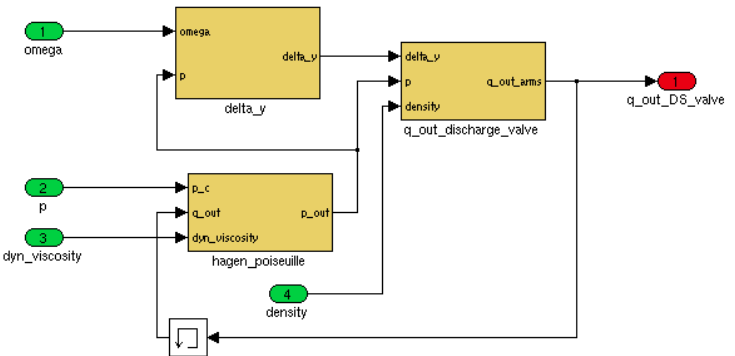
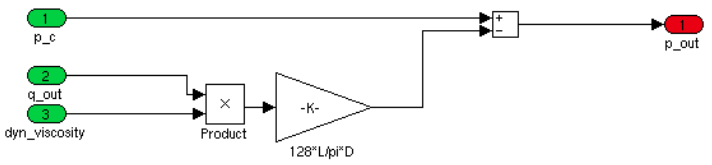
14. Потеря давления Хагена-Пуазейля . Уравнение Хагена-Пуазейля, описывающее потери в канале, показано выше. Входной сигнал является давлением в объеме муфты. Выходной сигнал – это давление, действующее на шарик, соединенный с рычагом.
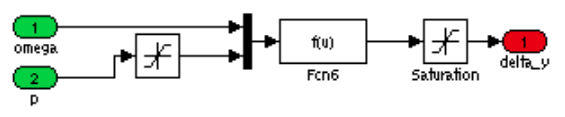
15. Дельта В. Этот функциональный блок определяет высоту рычага. Входное давление насыщается, предотвращая его отрицательное значение. Это объясняется тем, что ранее описанный блок потерь Хагена-Пуазейля, если объемное давление сцепления равно нулю, заставит давление достичь отрицательных значений, что невозможно.
16. Вытекает из выпускных клапанов . Это уравнение, описывающее поток через отверстие. Функциональный блок в верхней части модели вычисляет площадь этого отверстия. Поток умножается на три, поскольку это количество отверстий и в результате получается общий поток.