Повнопривідна муфта Haldex покоління V
AvtoAd
06/10/2022
Розробка та впровадження моделі повнопривідної муфти Haldex п’ятого покоління
Зміст
1. Вступ.
1.1. Про повнопривідну муфту Haldex.
1.2. Історія компанії.
1.3. Тягові системи Haldex.
1.4. Попередні покоління.
1.5. Покоління IV.
1.6. Покоління V.
2.1. Машина постійного струму.
2.2. Гідравлічний насос.
2.3. Гідравлічна рідина.
3. Завершена модель.
4. Результати та підтвердження.
4.1. DC-машина.
4.2. Гідравлічний насос.
4.3. Гідравлічна рідина.
4.4. Завершена модель.
5. Висновок.
Читайте також як зняти та встановити муфту Haldex.
Вступ
Про повнопривідну муфту Haldex
Під час водіння в складних умовах, таких як сніг, лід і бруд, звичайний автомобіль з двоколісним приводом не впорається. Для підвищення безпеки та продуктивності багато виробників автомобілів пропонують альтернативу з повним приводом. Однак існує велика різноманітність установок повного приводу. Деякі системи є повнопривідними, що означає, що всі колеса постійно отримують крутний момент від двигуна. Величина крутного моменту, розподіленого між передньою та задньою віссю, може мати фіксоване співвідношення, зазвичай 50/50, або бути змінною. Такі системи повного робочого дня поширені серед азіатських виробників автомобілів, таких як Subaru і Toyota. В якості альтернативи системам повного робочого дня існують системи, які називаються неповним робочим днем. Автомобілі, які використовують систему неповного робочого часу, можуть мати передній або задній привід за нормальних умов водіння. Для розподілу крутного моменту на іншу вісь потрібен якийсь пристрій для передачі крутного моменту. Існує безліч різних рішень, як цього можна досягти. Для передачі крутного моменту між правим і лівим колесами потрібен диференціал, здатний розподіляти доступний крутний момент.
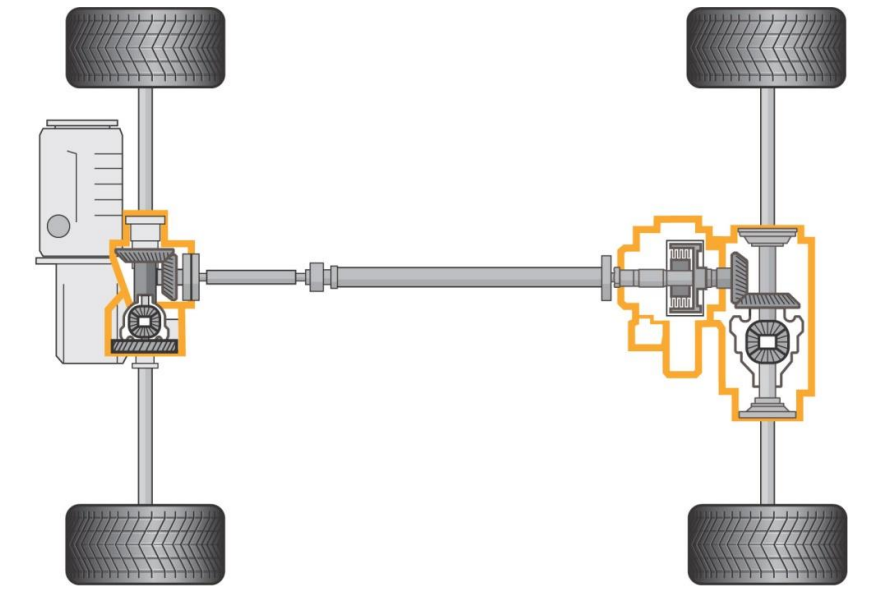
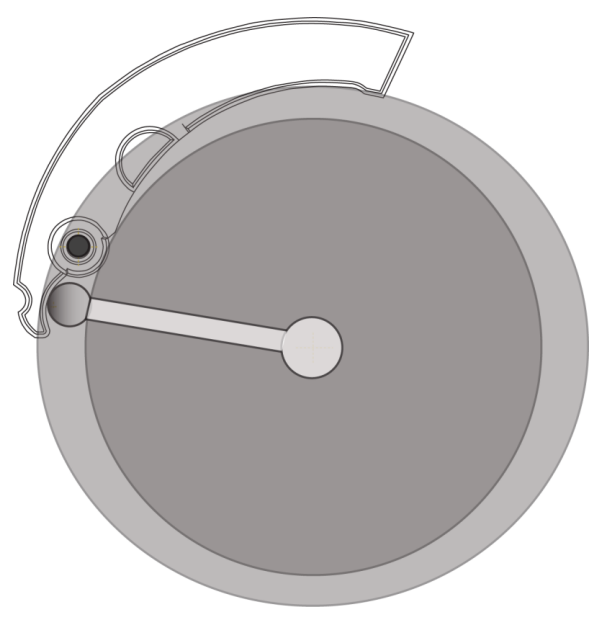
Ілюстрація трансмісії. Виділені зони – це задній і передній диференціали та муфта повного приводу:
У сучасних автомобілях ці системи зазвичай інтегровані з іншими системами, такими як ABS і ESP. Ці системи отримують дані від ряду бортових датчиків. Якщо автомобіль починає буксувати, система автоматично включається і допомагає водієві стабілізувати автомобіль.
Окрім підвищення безпеки, однією з переваг системи неповного робочого часу є дещо зменшене споживання палива завдяки зменшенню втрат у трансмісії. З іншого боку, систему неповного робочого дня важче контролювати, і вона часто страждає від затримок. Вона потребує швидкої та надійної стратегії керування, щоб запобігти неочікуваній поведінці системи.
Під час розбіркиі таких алгоритмів велике значення має модель системи. Час і гроші можна заощадити, якщо зменшити необхідність тестування програмного забезпечення безпосередньо в системі.
Історія компанії
Концерн Haldex був створений в 1985 році шляхом злиття трьох шведських компаній: Garphyttan, Haldex і Hesselman. На той час основним джерелом прибутку була промисловість виробництва пружинного дроту, на яку припадало 50 відсотків від загального обсягу продажів. Однак у 2009 році підрозділ було продано, і нині основний дохід приносять відділи «Тяга» та «Гідравліка». Після придбання Barnes Corp у 1987 році та Vickers у 1991 році була створена гідравлічна частина концерну. Патент на новий повний привід було куплено в 1992 році. Перше покоління зчеплення було випущено на ринок у 1998 році. У цей же рік було створено Haldex Traction Systems як підрозділ концерну Haldex.
Тягові системи Haldex
Патент, придбаний Haldex у 1992 році, був куплений у колишнього гонщика з ралі Зігге Йоханссона. Основна ідея полягала в тому, щоб зчеплення приводилося в дію насосом, який приводився в дію різницею швидкостей обертання коліс. Компанія Haldex розробила зчеплення в тісній співпраці з Volkswagen. У 1998 році почалося серійне виробництво зчеплення 1-го покоління. Відтоді багато компаній використовували зчеплення у своїх автомобілях, зокрема Volvo, Ford, Bugatti та SAAB/GM [2]. З 1998 року зчеплення вдосконалювалося, і зараз розробляється п’яте покоління. У 2009 році компанія Haldex оголосила про угоду з Volkswagen вартістю 4,5 мільярда шведських крон щодо забезпечення наступної платформи цією системою п’ятого покоління.
Попередні покоління
Перші два покоління повного приводу досить схожі й приводяться в дію різницею в швидкості коліс. Цей рух приводить в дію гідравлічний насос, який створює потік і приводить в дію LSC. Це означає, що ці системи є реактивними, тобто має відбутися пробуксовування коліс, перш ніж увімкнеться система. 1/4 оберту колеса створює достатній потік, щоб повністю зафіксувати вісь. Рівень тиску в LSC контролюється ЕБУ і регулюється лінійною дросельною заслінкою. Покоління II є подальшим розвитком першого покоління, але завдяки більшій кількості датчиків і електромагнітному пропорційному клапану загальна продуктивність була підвищена. Щоб ще більше скоротити час відгуку, Haldex представив покоління III з можливостями попереднього натягу, PreX. Додавання невеликого живильного насоса, що дає змогу забезпечувати крутний момент на задні колеса, навіть якщо колесо не пробуксовує, зменшило час реакції. Завдяки додаванню цієї функції система тепер є проактивною, що означає, що вона здатна регулювати потребу в повному приводі в режимі реального часу на основі інформації, яку надають бортові датчики.
Покоління IV
З поколінням Haldex IV була представлена унікальна система повного приводу. Система описується як інтелектуальна та здатна відчувати наміри водія. Крутний момент весь час розподіляється між чотирма колесами. Однак розподіл може бути від 2% від загальної кількості до 85% на одному задньому колесі. Завдяки передачі лише 4% крутного моменту на задню вісь під час руху, споживання енергії зменшується. І якщо ковзання відбувається на трьох шинах одночасно, якомога більше доступного крутного моменту передається шині, яка має зчеплення. Цей розподіл між задніми колесами контролюється багатодисковою муфтою, що регулюється гідравлічним тиском. У попередніх поколіннях цього були скарги на затримку часу відгуку. Це сталося через те, що ми не змогли достатньо швидко накопичити тиск. Завдяки введенню акумулятора з окремим живильним насосом високий тиск може бути миттєво доступним для використання для контролю. Цей контроль виконується електричним блоком керування (ECU). Використовуючи понад 20 датчиків навколо автомобіля, ECU оновлює розподіл крутного моменту 100 разів на секунду.
Покоління V
Щоб зменшити вагу та простір, акумулятор і регулюючий клапан, додані до муфти четвертого покоління, тепер видалені. Замість цього тиск має створюватися безпосередньо в пакеті зчеплення за допомогою спеціально розробленого живильного насоса. Насос - це машина, що створює потік, середовищем, що тече, є гідравлічне масло. Тиск на пакет зчеплення створюється, коли масло закачується в камеру, що містить поршень, який передає цей тиск на диски. Для підтримки достатньо низького часу відгуку насос має конструкцію, у якій потік рідини має два різні шляхи, якими його можна направляти. Коли досягається стабільний стан тиску, рідина більше не надходить у зчеплення, а лише викачується в навколишню систему. Коли вимагається підвищення тиску, вихід закривається, і весь потік надходить у пакет зчеплення.
Теорія та моделювання
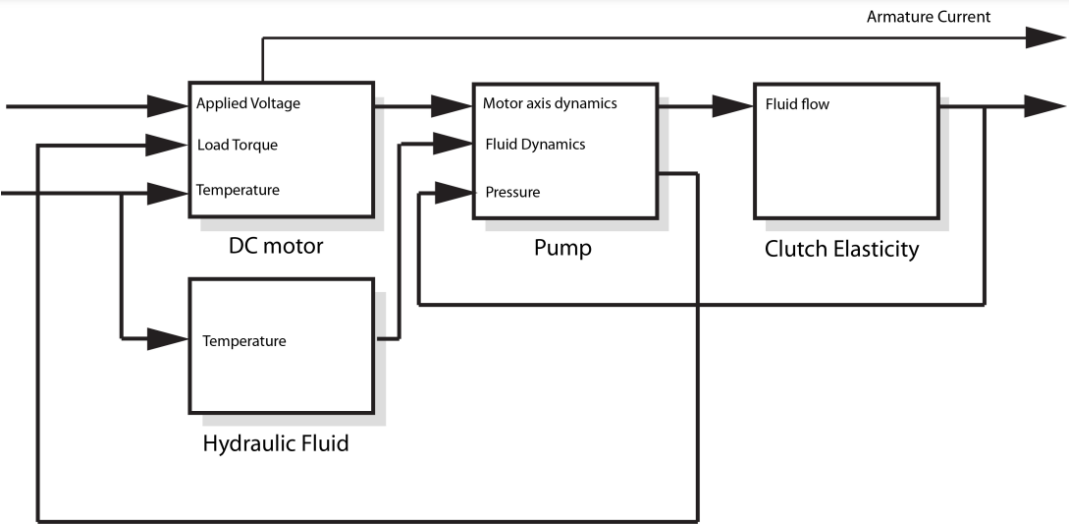
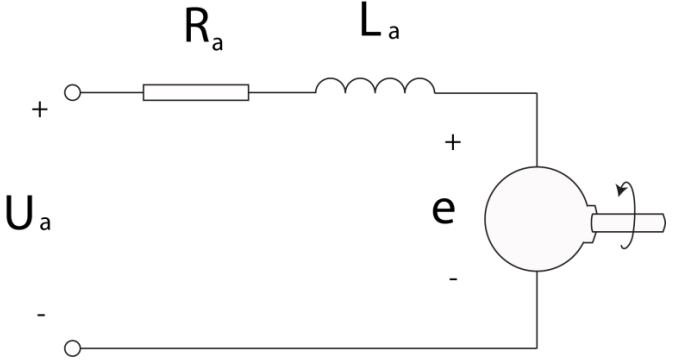
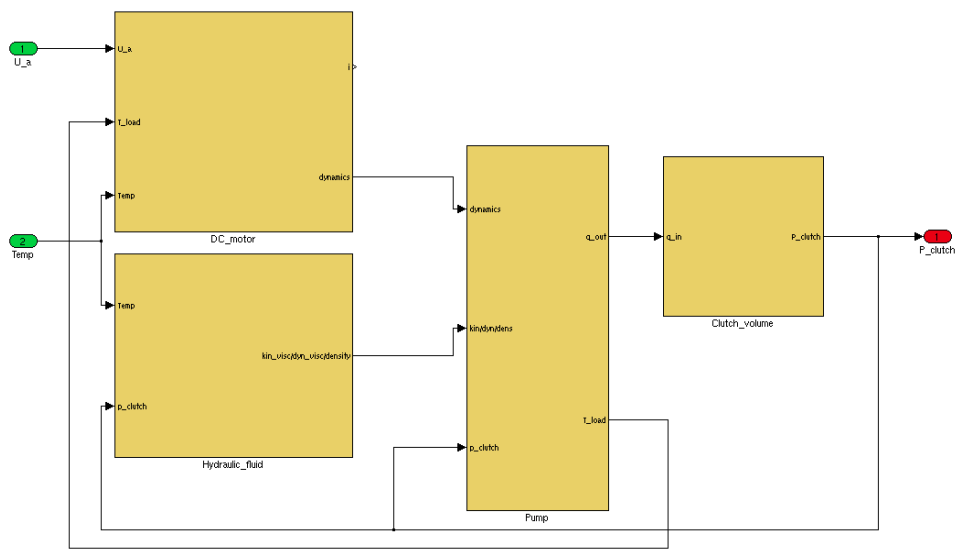
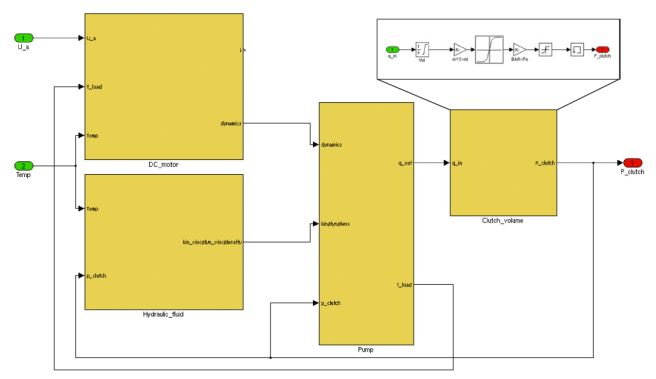
Повна модель складатиметься з чотирьох підсистем: двигуна, насоса, масла та багатодискового зчеплення. Можна переглянути модифіковану версію оригінальної схеми, яка ілюструє систему Gen V. Першою системою буде електродвигун. Сигналами, що надходять до цієї підсистеми, є напруга якоря та температура. Ці сигнали також є сигналами в повній моделі. Вихідні дані з підсистеми двигуна - це струм якоря та динаміка осі двигуна, тобто швидкість обертання, прискорення осі та положення.
Схема муфти Gen. V Haldex:

Динаміка осі двигуна вводиться в підсистему насоса разом з динамікою масла і тиском зчеплення. Вихід від насоса - це чистий потік, що входить або виходить з насоса. Цей потік є входом моделі зчеплення, яка має тиск у зчепленні як вихід. Потім цей тиск подається назад до насоса. Підсистема, яка розраховує динаміку масла, має температуру як вхідний сигнал і потім підключається до насоса. Вихід повної моделі - це тиск у муфті та струм якоря.
Структурна схема підсистем повних моделей:
Машина постійного струму
Машина постійного струму часто використовується як виконавчий механізм у всій промисловості сьогодні. Фундаментальна конструкція машини робить її міцною та меншою ймовірністю несправності або поломки під час роботи. Він також має майже лінійне співвідношення напруги якоря та швидкості, а також майже лінійне співвідношення струму та крутного моменту, що робить його відносно легким для керування. У цій главі буде розглянуто привод насоса генератора. V система повного приводу. Спочатку буде короткий опис принципу роботи машини постійного струму, а потім огляд рівнянь двигуна. Ген. V двигун - це 12-полюсна машина постійного струму з постійним намагніченням. Оскільки фактичних даних про час роботи немає, стандартні рівняння двигуна будуть використані для моделювання двигуна. Будуть зроблені деякі доповнення щодо різних видів тертя. Модель, реалізована в Simulink, також враховує різні види температури навколишнього середовища. Дані для цього надав виробник.
Принцип роботи
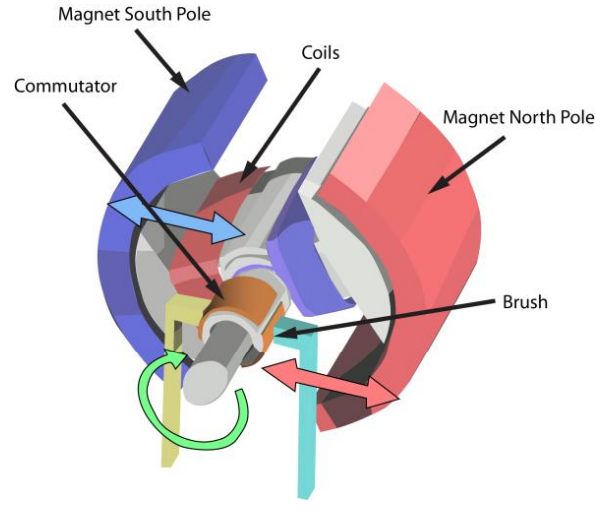
Двигун PMDC складається з обмоток, встановлених на роторі, кількох північних і південних полюсних магнітів, розташованих попарно, і комутатора. Постійні магніти встановлені навколо статора. Комутатор - це набір мідних провідників, закріплених на роторі. Струм передається до комутатора через пару вугільних щіток, які ковзають по поверхні комутатора, коли ротор обертається. Коли щітки змінюють пластину, струм у котушках змінює напрямок. Оскільки струм у котушці створює магнітне поле, зміна напрямку струму також змінює полярність цього магнітного поля. Розташування котушок і комутаторів таким чином, що індуковане магнітне поле притягує або відштовхує магніти в статорі, створює крутний момент.
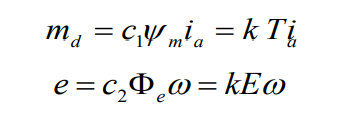
Керуючі рівняння
Диференціальні рівняння описують струм якоря, ia, індуковану напругу в якорі, ua, і електричний крутний момент, md.
Рівняння:
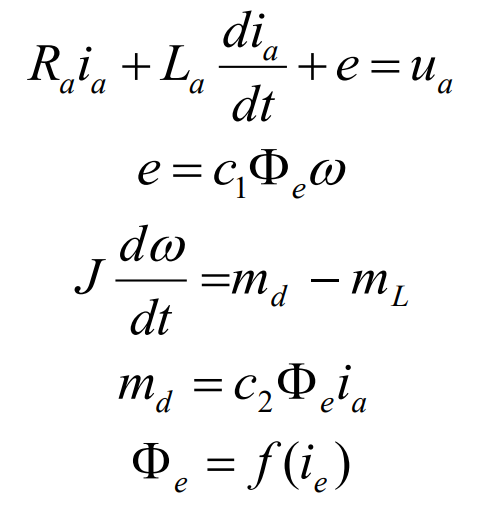
де mL - момент навантаження на вісь двигуна. Ця модель є однією з машин постійного струму з окремим виходом і тому також включає функцію для електричного магнітного потоку. Оскільки двигун у Gen V є двигуном PMDC.
Рівняння:
Отримуємо остаточне рівняння струму:
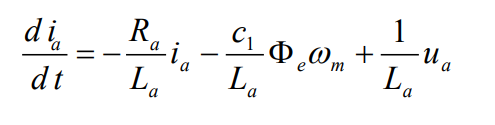
Виробник двигуна постійного струму надав дані, що залежать від температури, і константи для двигуна. Відповідними константами є константа крутного моменту kT і константа напруги kE.
Тертя і втрати
Рівняння, представлені в попередньому розділі, не включають жодних втрат у двигуні. Тут виникають два види втрат на тертя [4]; в'язке демпфування і динамічний момент тертя. Обидва вони залежать від температури. В’язке демпфування – це момент тертя, викликаний мастильною рідиною та рухомими частинами двигуна, і вважається прямо пропорційним швидкості. Динамічний момент тертя є кулонівським тертям і вважається постійним членом, що додає втрати.
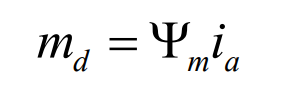
Додаючи ці умови та вводячи нові позначення, отримуємо остаточне рівняння крутного моменту:
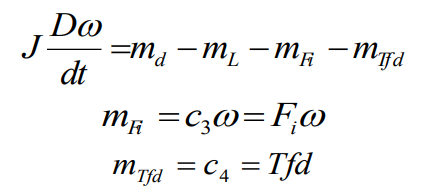
Де mFi — в’язке демпфування, а mTfd — момент динамічного тертя.
Інші явища, такі як вихрові струми та ослаблення поля, також спричинять втрати. Вихрові струми виникають, коли провідник піддається зміні магнітного потоку. Це може спричинити циркуляцію струму всередині провідника. Ці циркулюючі струми створюють магнітне поле, яке протистоїть магнітному потоку від постійного магніту. Ослаблення поля відбувається, коли струм протікає через обмотки котушки. Струм створює магнітне поле, яке спотворює та послаблює поле так само, як це роблять вихрові струми. Через брак експериментальних даних впливом цих явищ будемо знехтувати.
Підсумкові моторні рівняння
З використанням рівнянь і нових позначень отримано основні рівняння для машини постійного струму:
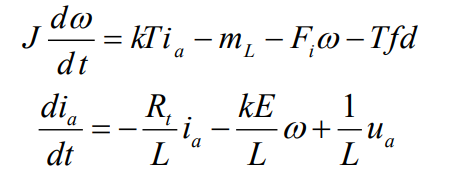
де Rt, kE і kT – параметри, що залежать від температури.
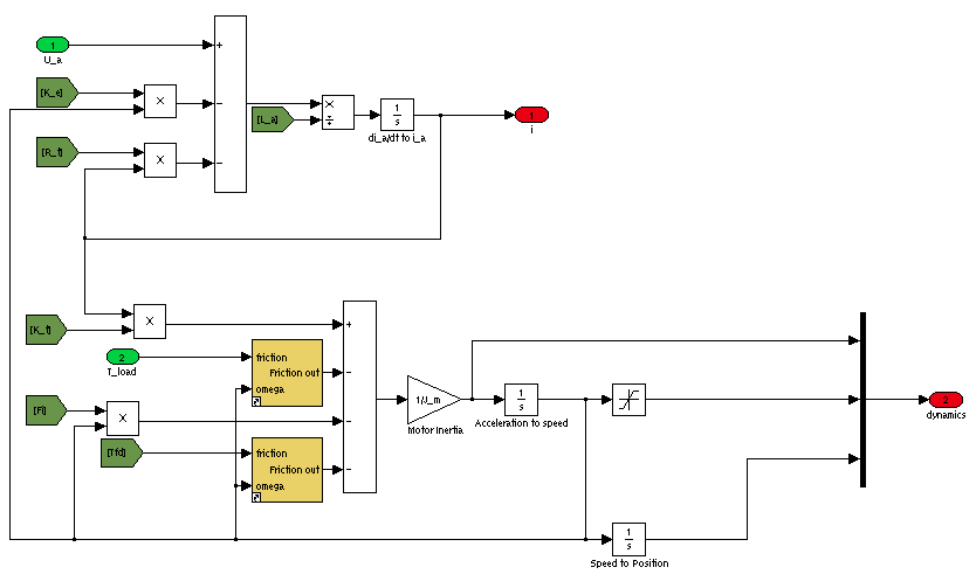
Модель Simulink
Блок двигуна в моделі Simulink має три входи: напруга якоря u_a, навантаження від насоса T_load і температура двигуна Temp. Останній вхід впливає на згадані раніше залежні від температури параметри. Усередині блоку використовується таблиця пошуку для кожного з цих параметрів із використанням Temp як вхідних даних. Вихідними сигналами блоку є струм якоря, ефективний крутний момент навантаження, що створюється машиною, а також швидкість обертання та кутове положення вала.
Гідравлічний насос
Аксіально-поршневий насос складається з трьох основних компонентів: корпуса, що містить поршні, кришки насоса та перекидної пластини [6]. Кут перекидної пластини визначає робочий об'єм насоса і може бути змінним або фіксованим. На насосі Gen V. перекидна пластина є кутовим упорним підшипником із фіксованим кутом. Стовбур утримується біля кришки насоса, яка містить всмоктувальний і нагнітальний отвори. Розташування цих портів таке, що всмоктувальний патрубок підключено до сторони низького тиску системи, а випускний патрубок – до сторони високого тиску. При обертанні стовбура поршні ковзають уздовж перекидної пластини. Кут перекидної пластини змушує поршні здійснювати зворотно-поступальні рухи вперед-назад, що створює насосну дію, тобто всмоктування рідини з боку низького тиску, випускання її з боку високого тиску.
Поперечний переріз перекидної пластини, ствола, поршнів і кришки насоса:
Як згадувалося у вступі, насос є машиною, що створює потік. Цей потік створює тиск у камері зчеплення. Щойно бажаний тиск досягається в муфті, потік, створюваний насосом, потребує альтернативного шляху, інакше він продовжить нарощувати тиск. Центр стовбура насоса Gen V є порожнистим, і рідина під тиском може досягати цієї камери. З цієї камери три просвердлені канали виводять рідину на поверхню стовбура. На поверхні знаходяться три плечі-важелі, що обертаються разом зі стволом. Вони призначені для управління відкриттям і закриттям канальних отворів. Якщо швидкість обертання достатньо висока, доцентрова сила повертає важіль і штовхає кульку, розташовану на її коротшому кінці, у випускний отвір, тим самим закриваючи його. Коли тиск у камері підвищується, сила рідини викликає обертальний рух у протилежному напрямку від відцентрової сили. Це відкриває випускний отвір і дозволяє витікати в навколишню систему. Плечі також діють як зворотні клапани, коли накачування припиняється, високий створений тиск у системі підніме плечі, створюючи таким чином високий потік через отвори каналу та викликаючи швидке падіння тиску.
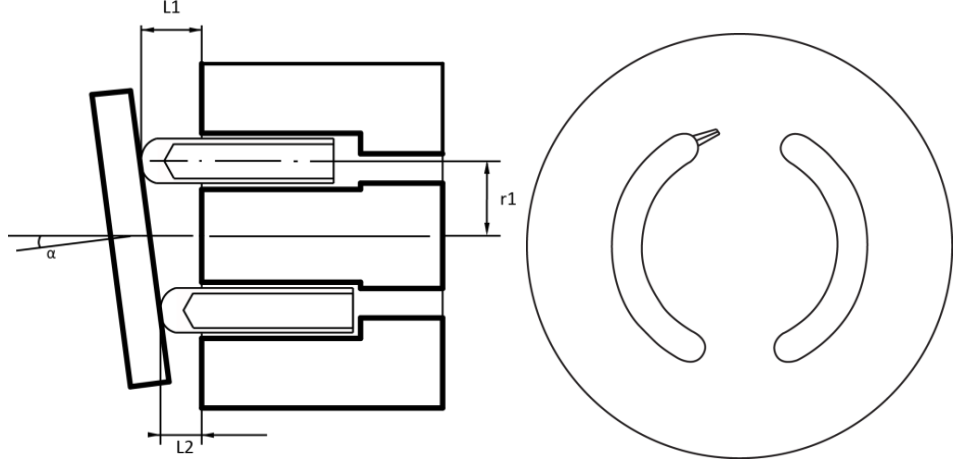
Положення поршня
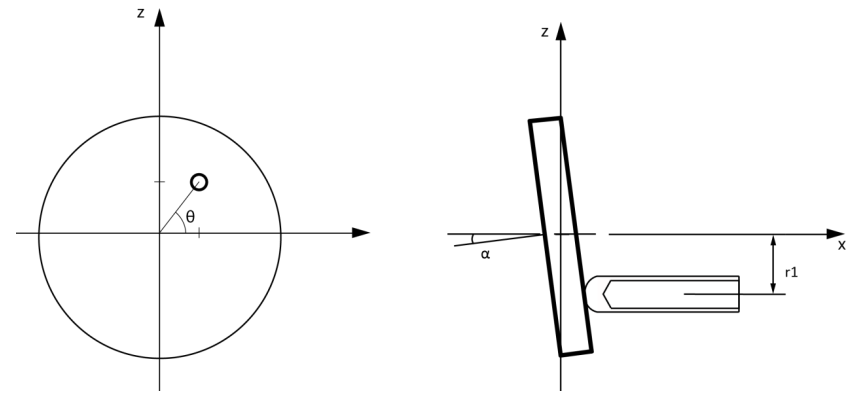
Для точного врахування сил, що діють на поршень, необхідно встановити систему координат для циліндра насоса, перекидної пластини та положення поршня. Визначена площина x, y, z має вісь x у напрямку вала машини постійного струму. Система координат.
Вивчаючи схему, можна визначити осьове положення поршня:

де r1 – радіус від центру стовбура до поршнів, а α – кут нахилу шайби. Це дає позицію, яка коливається між позитивним і негативним значенням. Потім додається константа pos_adj, щоб збалансувати позицію, яка дорівнює нулю в BDC. Оскільки для розрахунку сил, що діють на поршень, знадобляться швидкість і прискорення, це виходить.

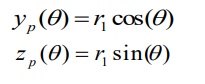
Координати y та z прості:
Поршневі сили
Склавши рівняння рівноваги системи, можна визначити сили, що діють на неї. Встановлено рівняння рівноваги в напрямку х.

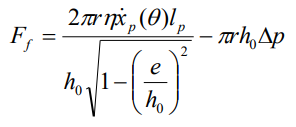
Сила тертя через в’язкість у циліндрі, коли поршень рухається всередині, визначається наступним рівнянням. Основними параметрами, що керують цим рівнянням, є в’язкість η, середній зазор між поршнем і циліндром h0 і швидкість поршня px.
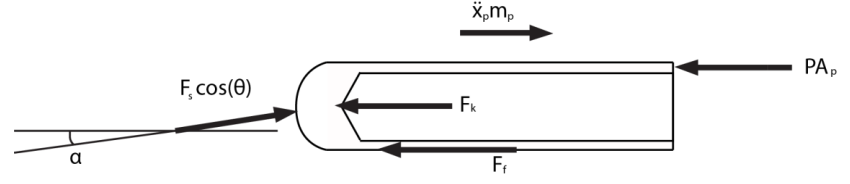
Зусилля в напрямку z можна розрахувати як функцію осьового кута. Передбачається, що сили реакції стовбура на поршень розташовані в самій внутрішній частині поршня та в точці, де поршень виходить із стовбура. Склавши рівняння рівноваги поршня, можна встановити рівняння моменту.

Сили, що діють на поршень в напрямку z:
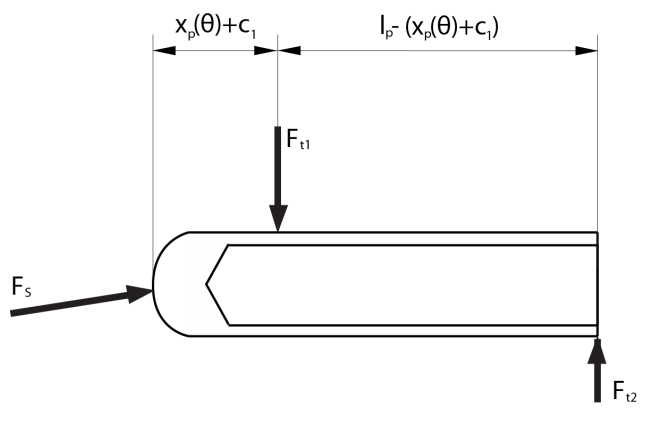
Виходить:
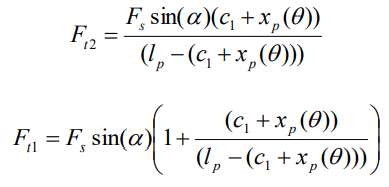
Ці сили Ft1 і Ft2 будуть використані для розрахунку втрат через тертя в поршневій камері.
Рівняння сили пружини:
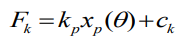
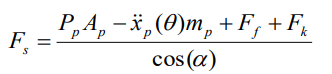
Після перебудови рівняння отримуємо вираз для сили, що діє на перекидну пластину:
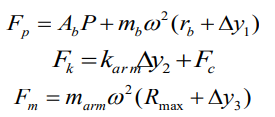
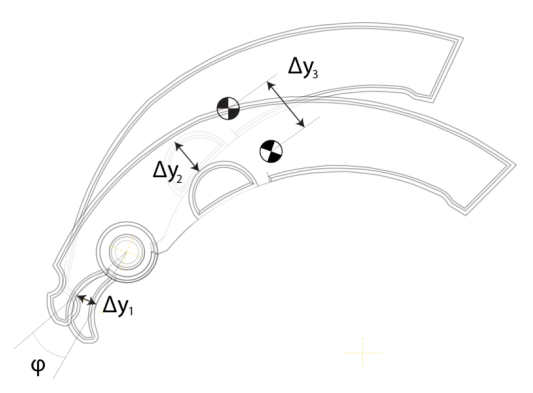
Важіль
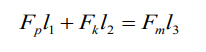
Метою цього розділу є обчислення потоку, що виходить через отвір у рукавах. Цей потік регулюється площею отвору в кінці каналу. Ця область, у свою чергу, регулюється Δy1, що є висотою між отвором і кулькою на кінці плеча важеля. Рівняння рівноваги для плеча проілюстровано за допомогою отвору для шпильки як центру обертання:
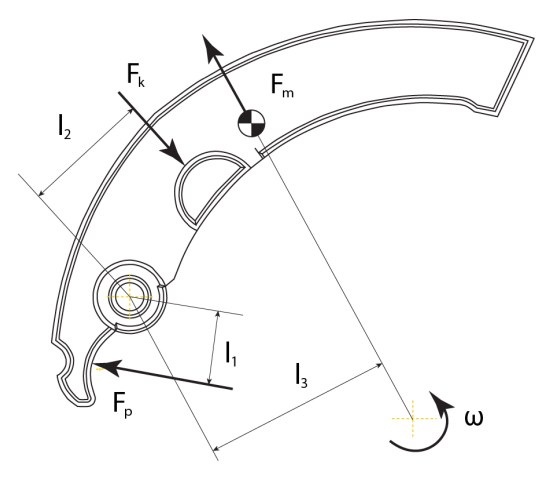
Ці сили задані:
де Ab залежить від висоти між випускним отвором і кулею. Щоб зробити всі рівняння залежними від цієї висоти, формуємо такі спрощення та співвідношення:
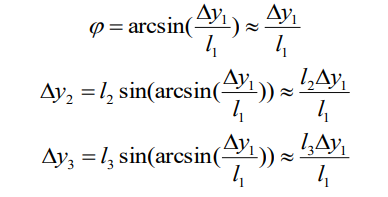
Спрощення рівнянь пояснюється невеликими змінами кута, які відбуватимуться під час роботи:
Хаген-Пуазей
Хагена-Пуазейля описує ламінарний потік нестисливої рідини в трубі. Використовуючи це рівняння потоку, можна розрахувати падіння тиску в каналі, що веде до отвору. Припускаючи відомий потік Q і геометрію каналу, потік Хагена-Пуазейля з нашими позначеннями стане:
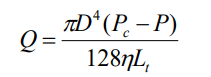
де η – в’язкість, D – діаметр труби, Lt – довжина труби, Pc і P – різні тиски. Це можна змінити на:
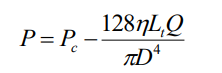
Переріз напірного каналу в стовбурі насоса:
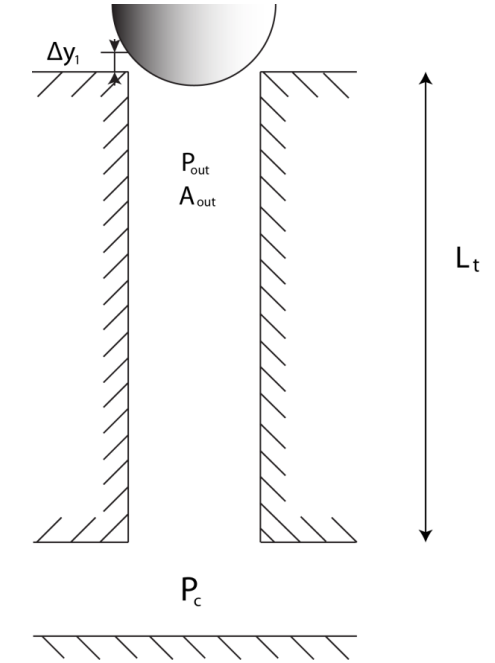
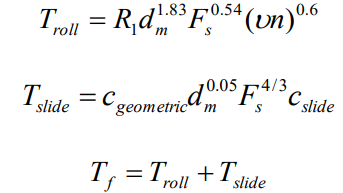
Рівняння потоку
Зрештою, це призводить до рівняння потоку. Потік через отвір визначається так:
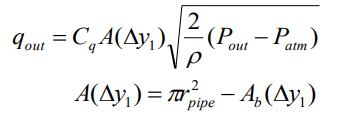
Момент навантаження на двигун
Загальний крутний момент навантаження, що діє на вал двигуна, складається з чотирьох різних крутних моментів: в’язкого крутного моменту Tv, викликаного рухом рідини в насосі, крутного моменту тертя в підшипниках та інших частинах, що рухаються один проти одного Tf, і крутного моменту, викликаного інерцією. TI. Усе це залежить від швидкості обертання або прискорення вала.

Проілюстровано рівняння рівноваги для крутного моменту навколо вала двигуна. Внесок сил поршня в загальний крутний момент Ts описується:

де α – кут нахилу пластини, а довжина плеча описується r1cos(θ).
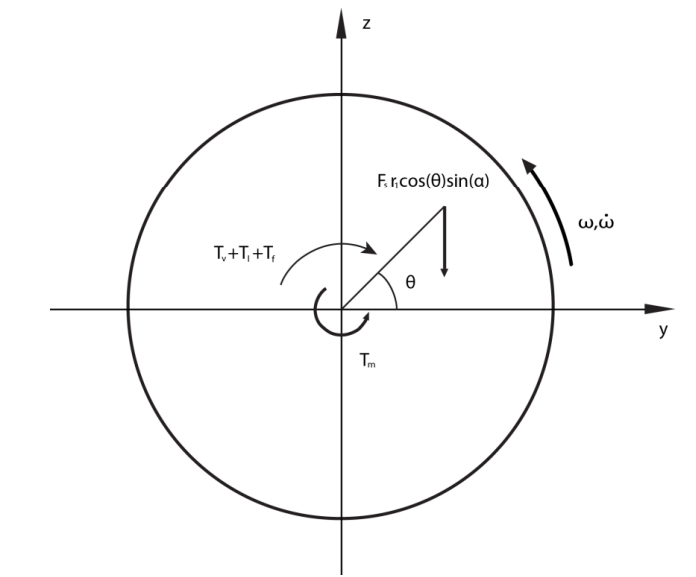
Момент тертя в упорному осьовому підшипнику розраховується відповідно до емпіричних співвідношень, наданих SKF, і визначається за формулою:
Крутний момент через в’язкість Tf, оскільки для нього неможливо знайти емпіричні співвідношення, оцінюється як функція швидкості обертання та прискорення. Інерцію Ip підшипників, ствола та поршнів було розраховано за допомогою системи CAD і було задано постійне значення. Рівняння для цього внеску визначається як:
Поршнева течія та витоки
Коли ствол починає обертатися, поршні змушені здійснювати зворотно-поступальні рухи вперед і назад, створюючи дію накачування. Ідеальний потік, який може забезпечити один поршень, описується рівнянням:
Витік тече в насосі:
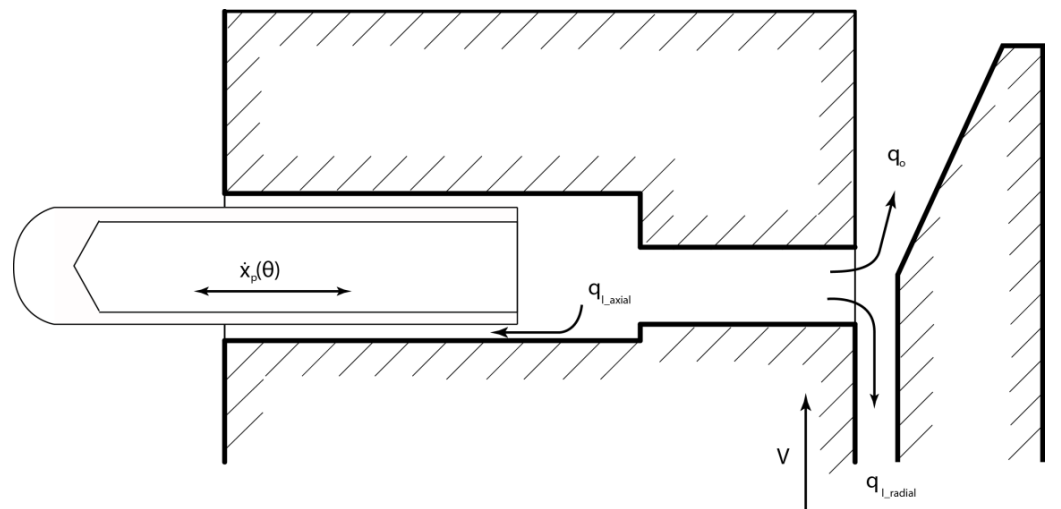
Усі гідравлічні насоси мають внутрішні витоки. Щоб врахувати ці внутрішні втрати, вводиться витік в осьовому напрямку між поршнем і циліндром, а також витік в радіальному напрямку.
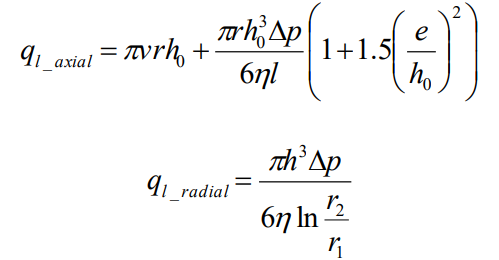
Ексцентриситет e поршня вважається рівним нулю, тому рівняння можна спростити так:
Чистий потік насоса тепер можна описати рівнянням:

Пакет зчеплення та тиск у системі
Існує еластичність тиску, що створюється в муфті. Різні пакети зчеплення мають різну еластичність залежно від приводу, корпусу муфти, зносу та кількості дисків, які використовуються. Тому динаміка пакету зчеплення повинна бути включена в модель.
Компанія Haldex провела серію тестів, щоб встановити співвідношення пружності, піднявши тиск на пакет зчеплення та вимірявши об’ємне розширення. Ці вимірювання містять загальну характеристику, включаючи еластичність масла. Дані про еластичність, використані в цьому моделюванні, базуються на характеристиках пакета зчеплення, розробленого для Volkswagen. Певний об’єм гідравлічної рідини в пакеті зчеплення відповідає рівню тиску, тобто тиск у системі є функцією об’єму. Потік інтегрується в часі, таким чином представляючи обсяг, і використовується як вхідні дані для таблиці пошуку, що містить дані еластичності. Вихідним сигналом є тиск у системі, який потім повертається до моделі.
Модель Simulink
Модель насоса Simulink розділена на три підсистеми. Спочатку розраховується положення поршня, прискорення та швидкість. Вони надсилаються до блоку, де розраховується навантаження на вал двигуна, а також блоку, який обчислює потік з насоса.
Читайте також як перевірити рівень масла в муфті Haldex.
Гідравлічна рідина
Оскільки модель повинна працювати в широкому діапазоні температур, властивості гідравлічної рідини стають істотними. Властивості, що моделюються, це щільність, в'язкість і об'ємний модуль. Оскільки були доступні вимірювання щільності, щільність моделюється як функція температури, навіть якщо гідравлічну рідину можна вважати нестисливою з дуже малими варіаціями щільності, як наслідок. В’язкість має значну температурну залежність і апроксимується на основі вимірювань, проведених у Haldex.
Керуючі рівняння
Властивості рідин дуже складні, і вважається, що фізика лежить поза межами мети цієї магістерської роботи. Таким чином, математична модель базується на емпіричних співвідношеннях і експериментальних даних.
Щільність
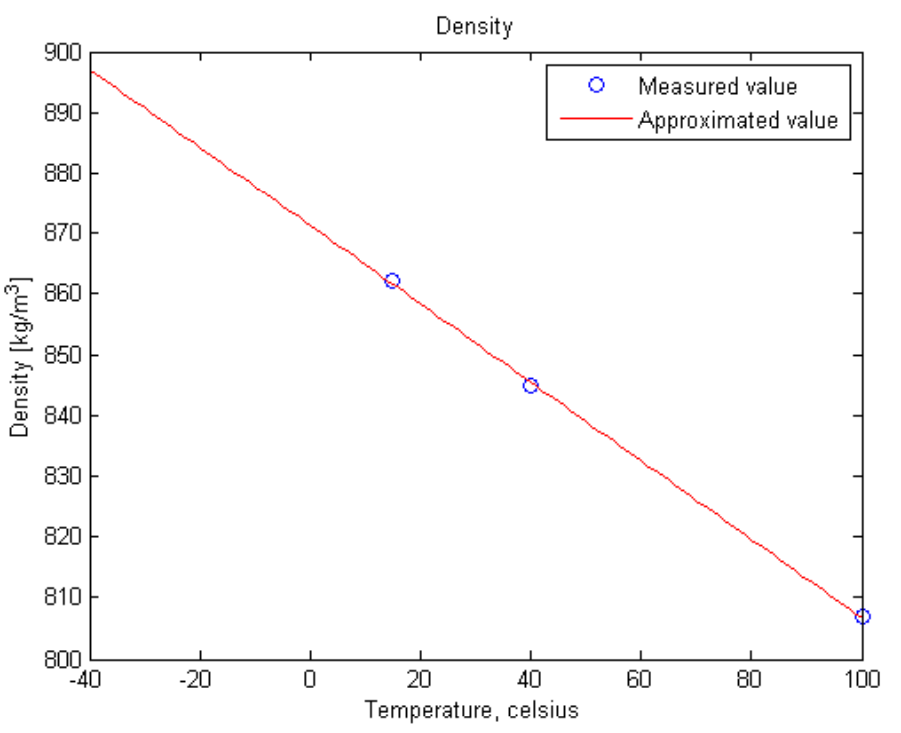
Щільність використовується для розрахунку динамічної в'язкості. Він апроксимується лінійною функцією температури.
В'язкість
В'язкість є мірою внутрішнього тертя в рідині і впливає на продуктивність гідравлічного насоса. Кінематична в'язкість, ν, розраховується відповідно до співвідношення:
Знаючи кінематичну в’язкість при двох різних температурах, Tk, можна визначити константи A і B.
Об'ємний модуль
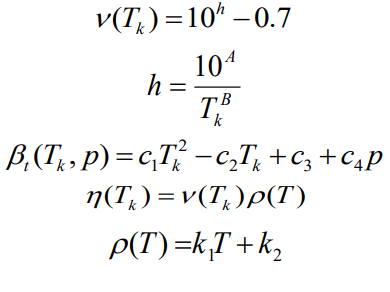
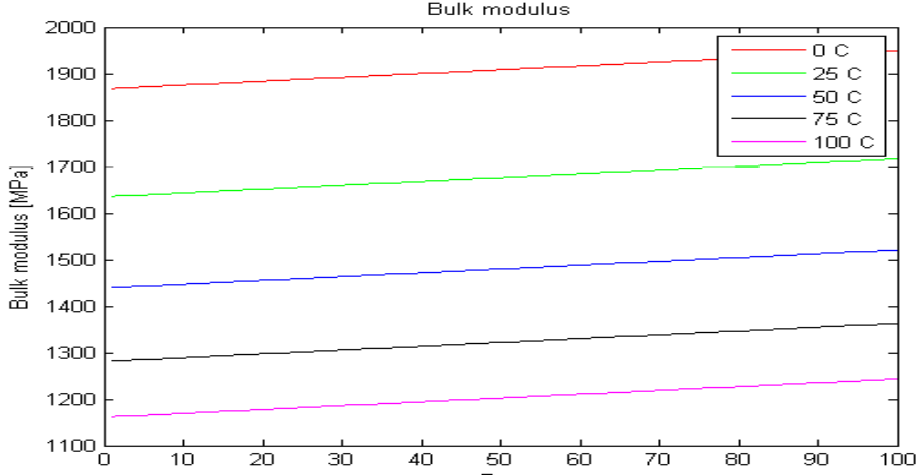
Модуль об’ємної пружності є мірою стисливості рідини і залежить як від тиску, так і від температури. Оскільки не було доступних експериментальних даних, об’ємний модуль був змодельований відповідно до даних, знайдених Олссоном О. та Рідбергом К.Е., і апроксимований квадратичною функцією температури та тиску.
Рішення
Розв’язуючи рівняння 3.58, отримують остаточне рівняння для в’язкості, об’ємного модуля та густини. Константи c1-c4, k1 і k2, використовуються для апроксимації функції:
Завершена модель
Загальна модель
Повна модель, як і фактичне обладнання, регулюється обертанням вала двигуна. Використовуючи рівняння двигуна для вирішення кута, швидкості та прискорення вала, можна визначити осьове положення, швидкість і прискорення кожного окремого поршня. Потім вони використовуються для розрахунку крутного моменту навантаження та потоку, створюваного кожним поршнем. Додавання цих потоків генерує загальний потік. Шляхом віднімання потоку, що виходить через отвір на плечах важеля, розраховується загальний потік у зчеплення або вихід із нього. Цей потік використовується для оцінки кількості рідини всередині муфти, яка, у свою чергу, використовується для розрахунку тиску, що діє на муфту. Цей тиск є вирішальним фактором потоку через отвір на плечах важеля і, таким чином, повертається до цього рівняння.
Модель Simulink
Повна модель Simulink розділена на чотири підсистеми: двигун, насос, динаміка гідравлічної рідини та одна, що описує тиск.
Результати та підтвердження
DC-машина
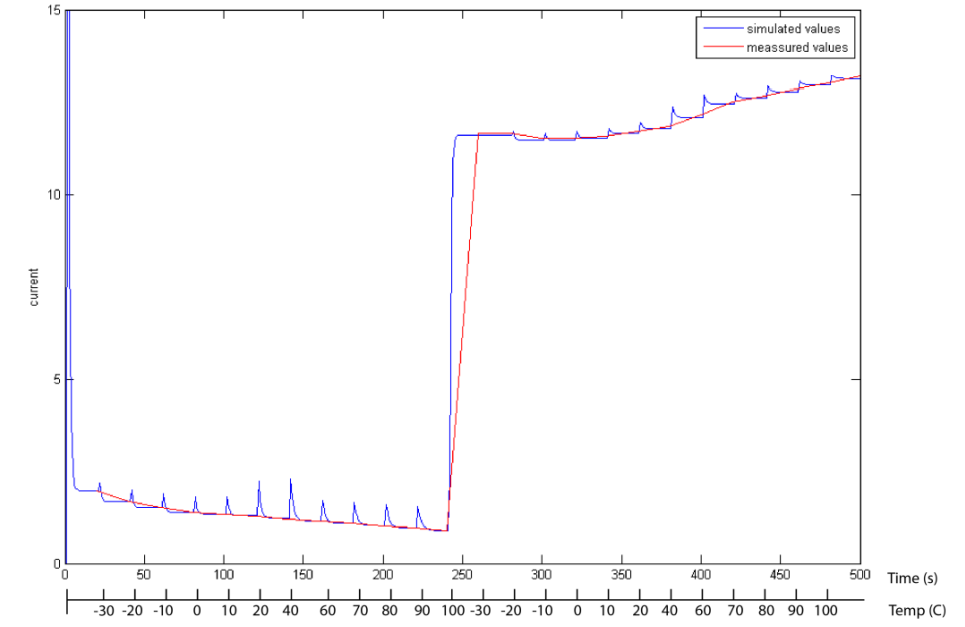
Модель MATLAB/SIMULINK перевіряється на дані, надані виробником. Оскільки немає доступних динамічних даних, модель перевіряється лише на статичну поведінку з постійною напругою живлення у вольтах. У перших зразках двигун працює без зовнішнього навантаження з підвищенням температури від -3 до C. Потім двигун навантажується постійним крутним моментом 20 Нсм, а потім температура знову знижується до -30 градусів.
Струм якоря, в DC-машині, спочатку без навантаження від -30 до 100 град. Після 245 проб приклали навантаження і температуру знизили від 100 до -30 градусів:
Швидкість обертання вала машини постійного струму під навантаженням і без навантаження від -30 до 100 градусів:
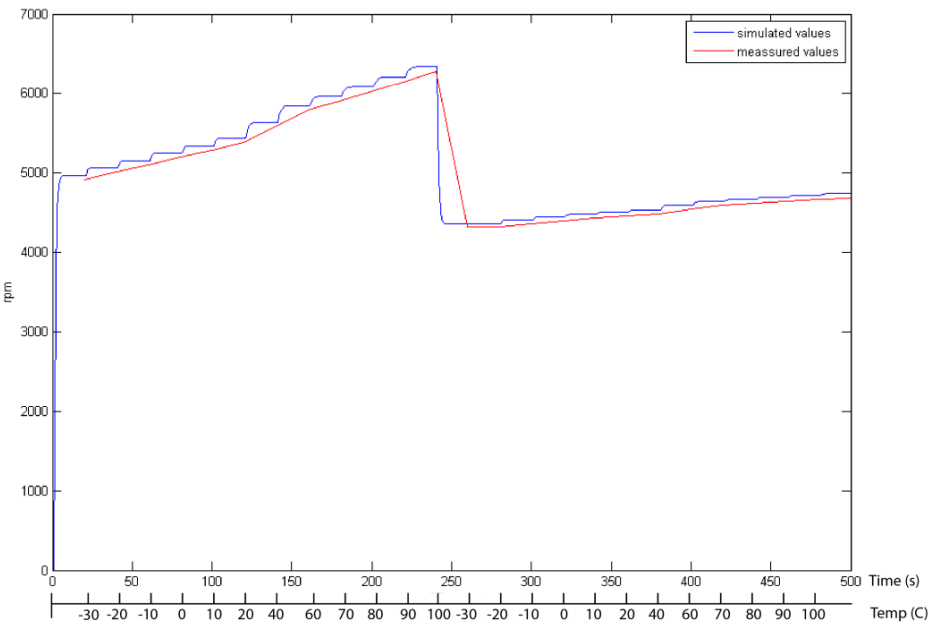
Симуляції показують хорошу узгодженість із цифрами, наданими виробником двигуна. Однак слід зазначити, що ці цифри, надані виробником, мають розбіжність у 8%. Зміна констант двигуна, очевидно, вплине на роботу моделі.
Гідравлічний насос
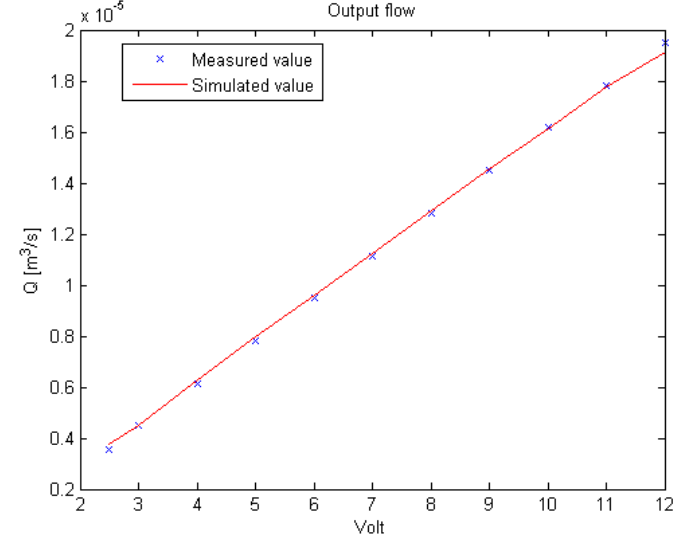
Компанія Haldex провела експериментальні вимірювання корисної витрати насоса. Незважаючи на те, що ці вимірювання є суто статичними, вони все одно підтверджують правильність змодельованих статичних потоків.
Виміряні та змодельовані статичні потоки від гідравлічного насоса:
Гідравлічна рідина
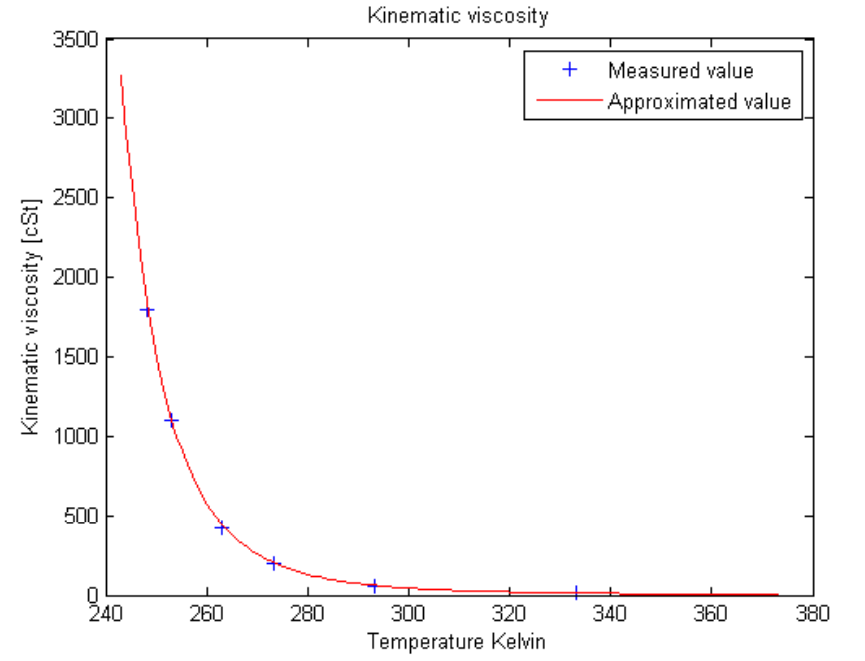
Кінематична в'язкість апроксимується логарифмічною функцією на основі вимірювань, проведених Haldex. Однак, оскільки вимірювання були доступні, а густина використовується для обчислення динамічної в’язкості, функція є життєво важливою. Функція об'ємного модуля реалізована в MATLAB/Simulink, але фактично не використовується в поточній моделі. В основному це пов’язано з двома речами. Коли було введено показник пружності в LSC, стисливість масла вже була включена в вимірювання. Інша причина полягає в тому, що гідравлічна система вважається повністю вільною від повітряної суміші. Тому гідравлічну рідину можна вважати нестисливою, і порівняно з механічною жорсткістю в LSC це мало б вплив на результат. Проте автори цієї дисертації навмисно не видалили ці блоки з моделі. Якщо обставини зміняться в майбутньому, вони можуть бути корисними.
Кінематична в'язкість як функція температури:
Щільність як функція температури:
Об’ємний модуль як функція температури і тиску:
Завершена модель
Вимірювання проводилися за допомогою випробувального стенда з фактичною системою. З цієї установки реєструється прикладена напруга, результуючий струм якоря та тиск. Також реєструються температура масла та час. Потім ці дані використовуються для порівняння з моделлю. Нижче наведено покрокові відповіді та зміни. Нарешті один сеанс, де прикладена напруга ближче до робочої ситуації, порівнюється з симуляцією.
Кроки
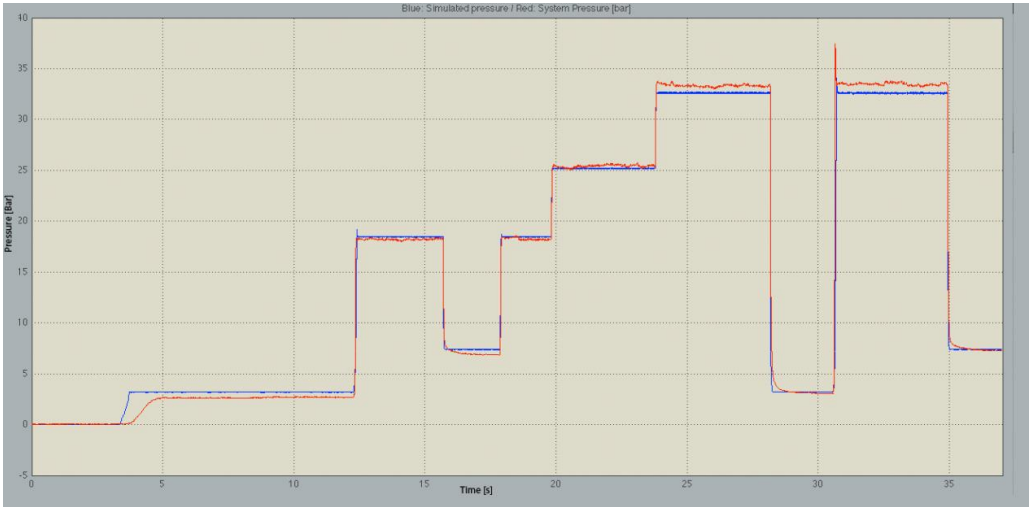
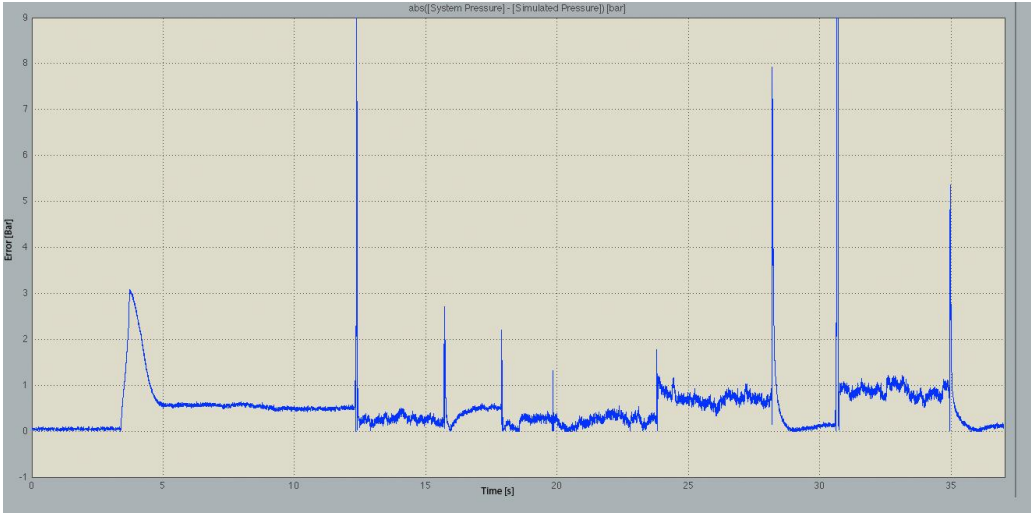
Виконується ряд кроків протягом усього робочого інтервалу. На наступних малюнках вимірюється похибка між фактичним тиском і змодельованим.
- Виміряний тиск (червоний) та імітований тиск (синій):
- Помилка тиску:
- Виміряний струм (червоний) та імітований струм (синій):
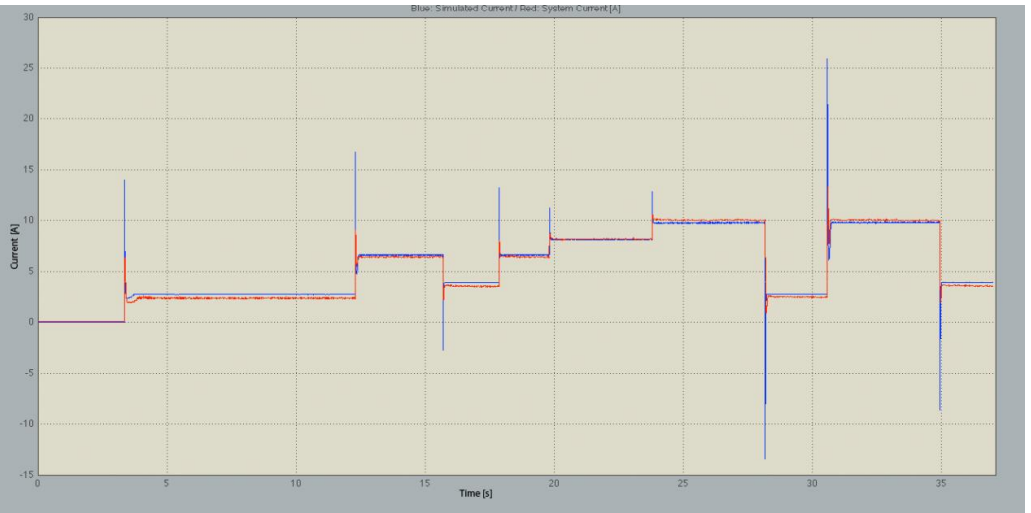
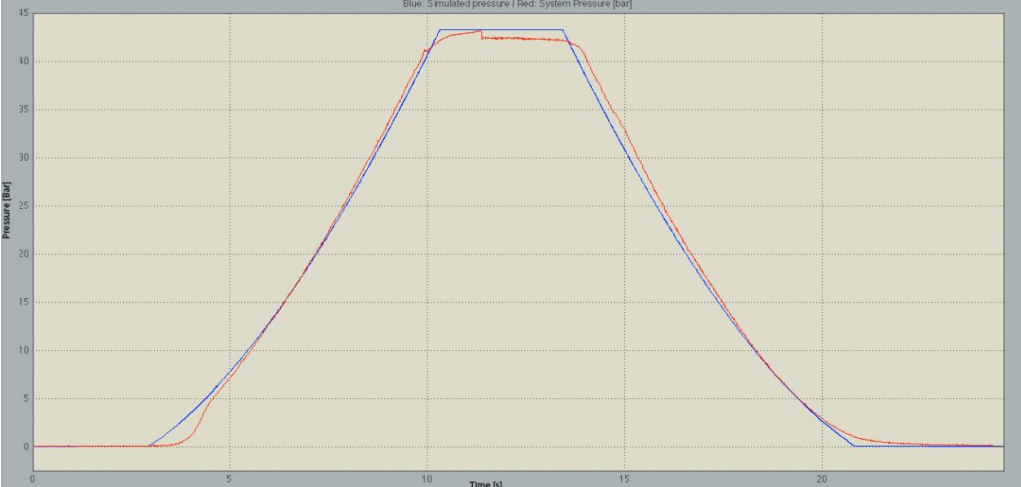
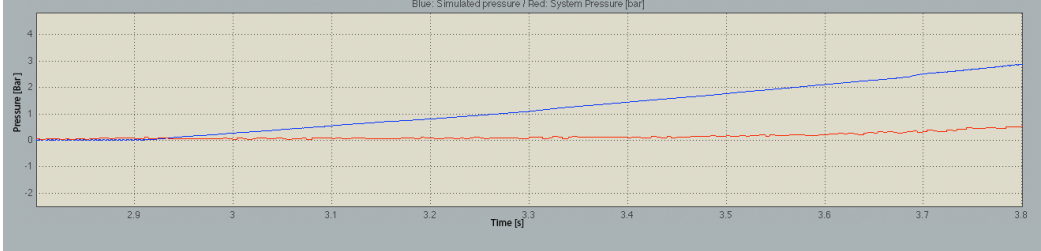
Ці порівняння показують, що наростання тиску в симуляції відбувається дещо швидко. Хоча, як тільки досягається більш високий тиск, вище 5-7 бар, моделювання точно відповідає фактичним даним. Струм демонструє ті ж характеристики; при нижчому крутному моменті та тиску струм якоря не зовсім відповідає, але більш точний при більш високому тиску.
Рампа
При повільному підвищенні, а потім зниженні напруги якоря система та модель показують наступні характеристики, зображені у наступних малюнках.
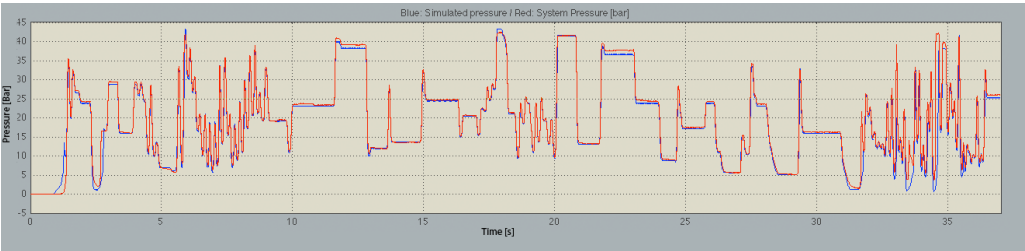
- Виміряний тиск (червоний), імітований тиск (синій):
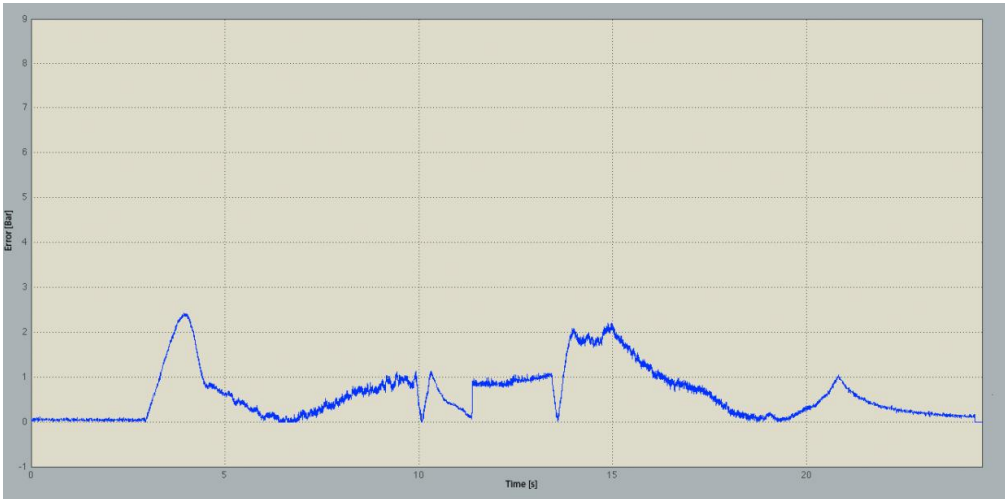
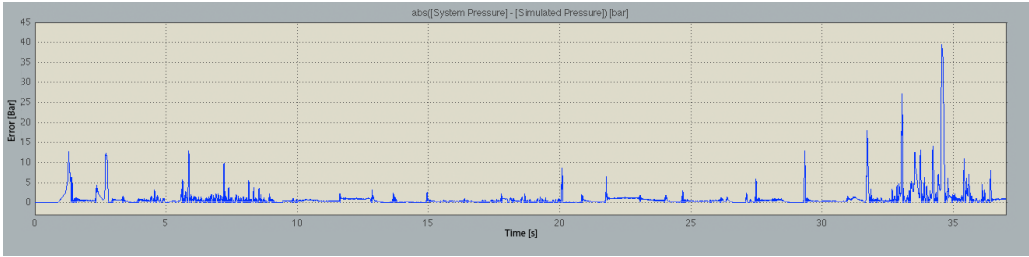
- Помилка між фактичним і змодельованим тиском:
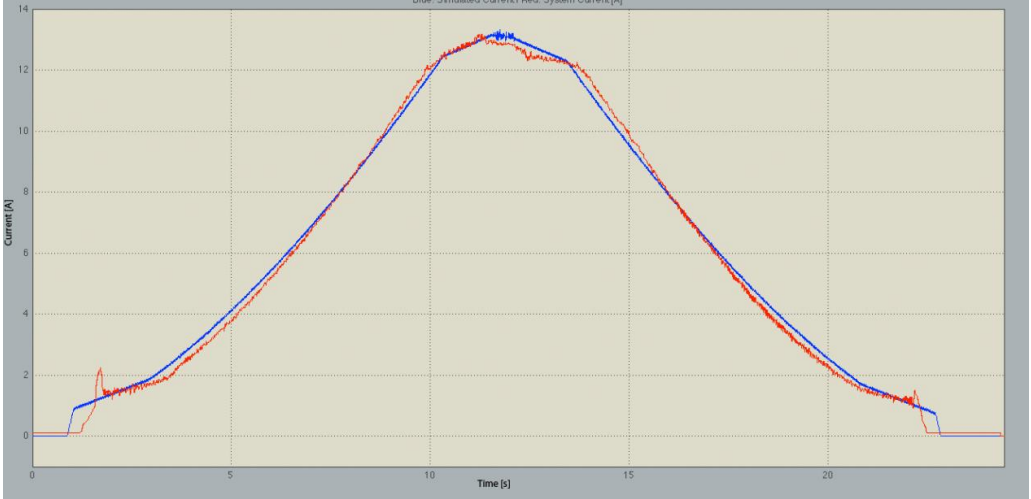
- Змодельований струм (синій) та виміряний (червоний):
- Підвищення тиску, коли тиск починає зростати:
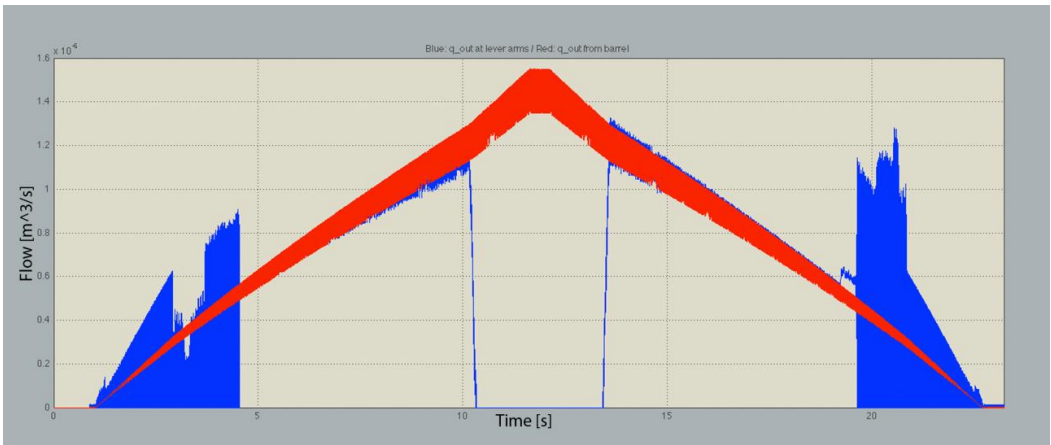
- Потік від насоса (червоний) і потік, що виходить через отвір на плечах важеля (синій):
- Потік від насоса (червоний) і потік, що виходить через отвори на плечах важелів (синій) протягом повного циклу рампи:
Оперативна обстановка
Щоб отримати уявлення про те, наскільки добре модель відповідає реальній оперативній ситуації, на платформі було виконано третій запуск. Метою було імітувати ситуацію, коли автомобіль буксує на льоду чи снігу. Така ситуація була зафіксована шляхом випадкової зміни напруги, що подається на двигун, чергуючи високу та низьку частоти. Похибка в тиску і поточні порівняння також представлені нижче.
- Вимірювання тиску. Виміряний тиск (червоний) та змодельований тиск (синій):
- Похибка між виміряним і фактичним тиском:
- Струм під час роботи. Виміряний (червоний) і змодельований (синій):
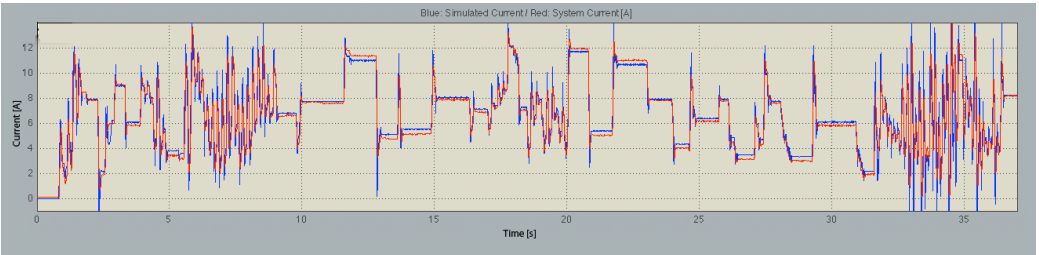
Не дивно, що це моделювання демонструє ті самі характеристики, що й у попередніх моделюваннях. За низького тиску, особливо під час запуску, симуляція виконується швидше, ніж фактична система. У цьому розділі буде розглянуто точність моделі, а також дослідження та порівняння вхідних/вихідних даних повної моделі. Також обговорюватимуться можливі області, що викликають помилки.
Точність моделі
Щоб визначити точність моделі, було детальніше вивчено два вищезазначених моделювання: рампу та оперативну ситуацію. Відсоток похибок між виміряним і змодельованим струмом і тиском було зареєстровано. Дані з цих симуляцій були відсортовані щодо напруги якоря, і була розрахована середня похибка в регіоні роботи.
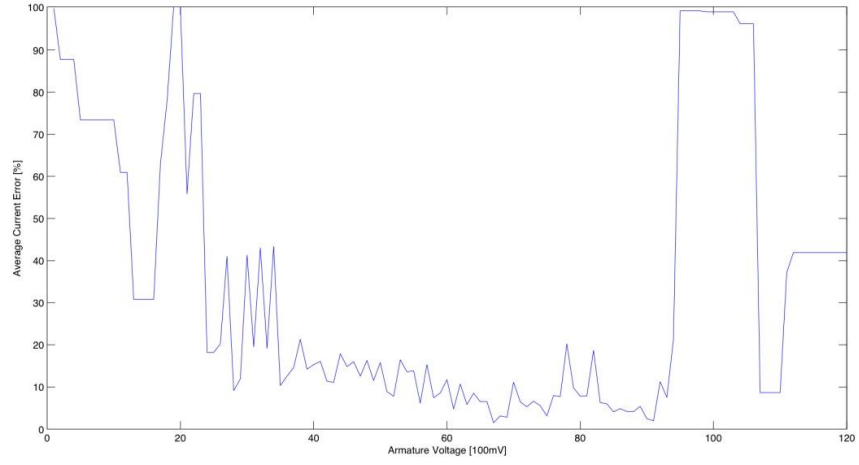
- Поточна помилка моделювання рампи:
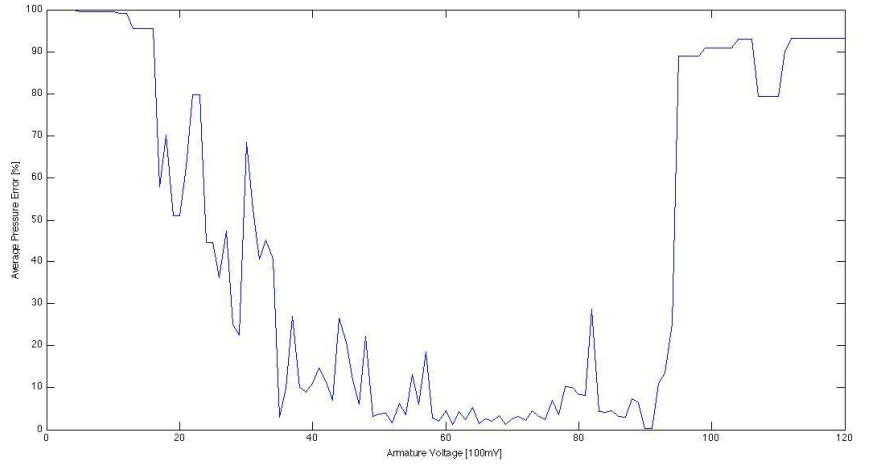
- Помилка тиску в моделюванні рампи:
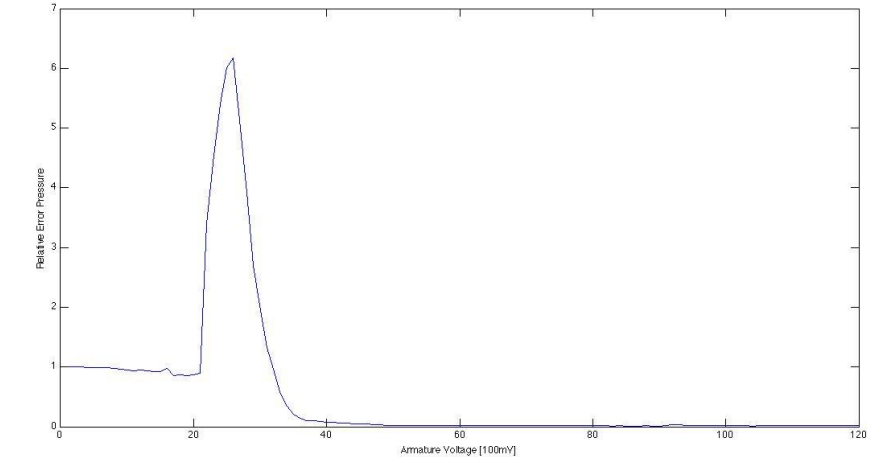
Цифри вище взяті з циклу випробувань на рампі. Як видно на цих малюнках, похибка більша, насправді дуже велика, при нижчих напругах. Це узгоджується з попередніми результатами, але може ввести в оману. Абсолютна похибка дуже мала при нижчих напругах, приблизно 0,05 бар. Також виконується більш ретельний аналіз відносної похибки.
- Відносна похибка тиску при моделюванні рампи:
- Відносна похибка струму при моделюванні рампи:
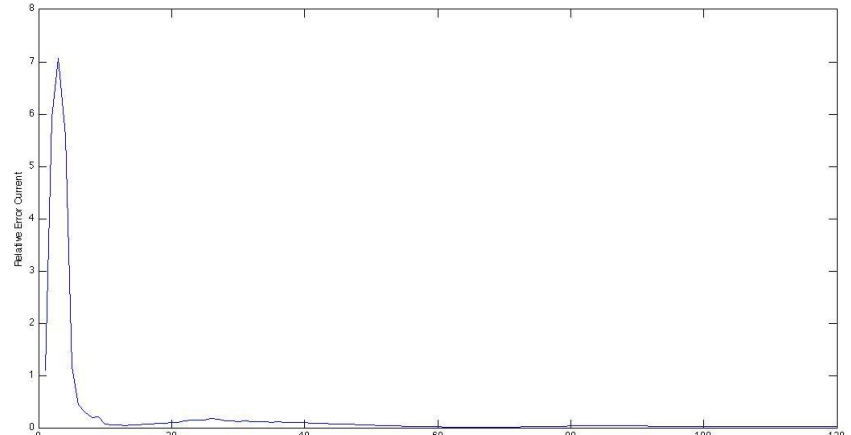
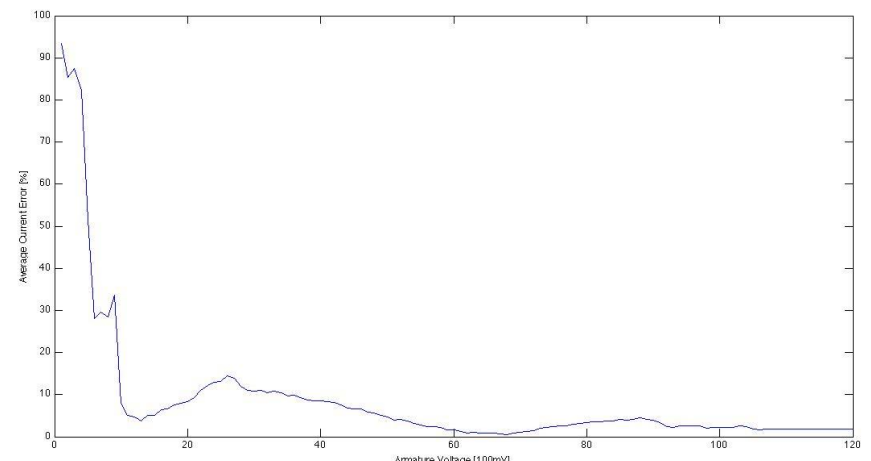
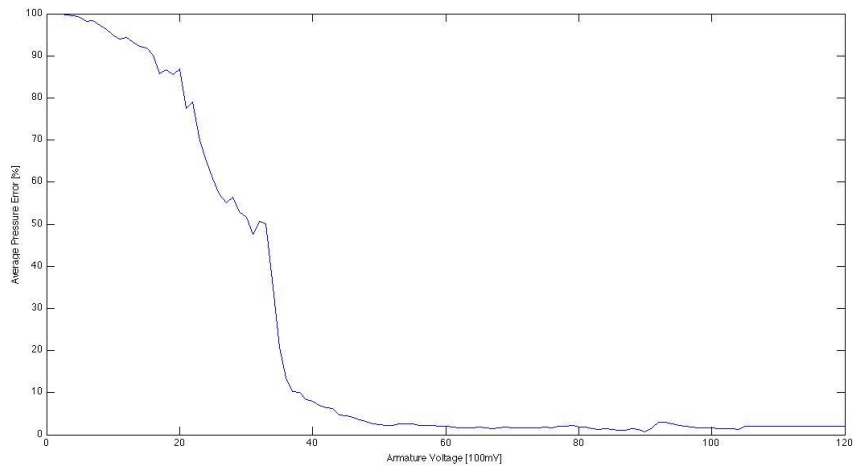
Оперативна обстановка показує схожу ситуацію, як пандус. При нижчих напругах відсоток помилок більший, як і при вищих напругах. У середній області похибка набагато менша, у наступному розділі буде обговорено, чому.
- Відсоток помилки тиску під час робочої ситуації:
- Поточна похибка у відсотках під час робочої ситуації:
Можливі причини помилки
Основна причина великих похибок у відсотковому співвідношенні при вищих напругах у робочому циклі полягає в тому, що напруга рідко досягає цих високих значень під час моделювання, і то лише у високочастотних областях. Це карає модель, яка працює трохи повільно або трохи швидко, створюючи великі помилки. Крім того, що стосується струму, великі перехідні процеси виникають під час моделювання, коли відбуваються зміни напруги. Ці перехідні процеси, швидше за все, також відбуваються в реальному двигуні, але через відносно низьку частоту дискретизації вони не будуть записані. Нижче наведено кілька більш детальних аналізів результатів моделювання оперативної ситуації.
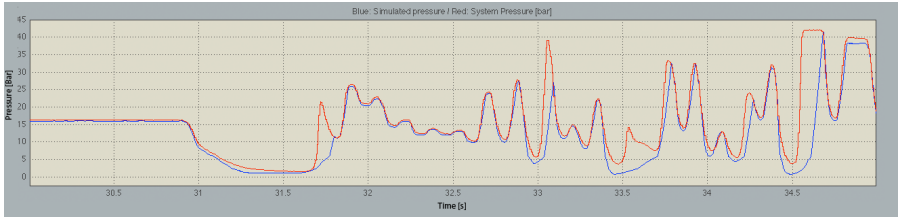
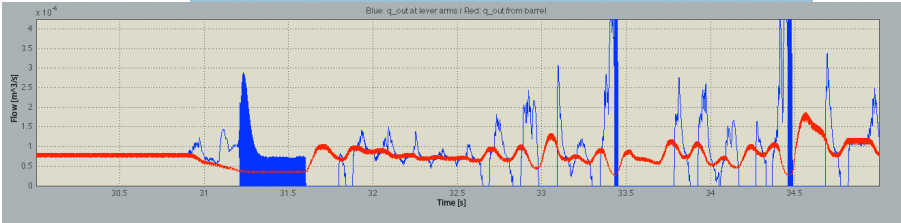
- Крупний план тиску в інтервалі між 30 і 35 секундами:
- Збільшене зображення потоків від насоса та важелів протягом періоду 30-35 секунд моделювання:
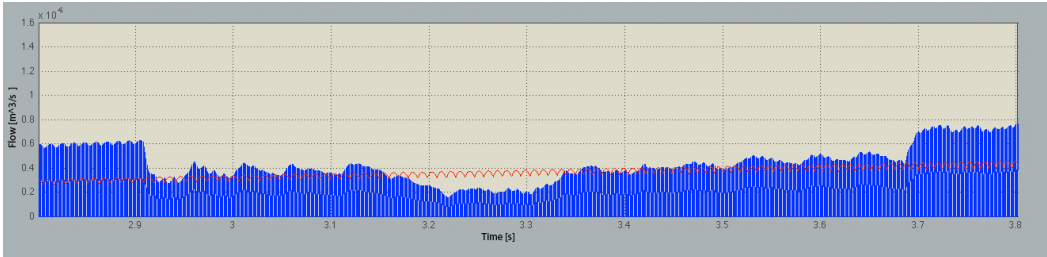
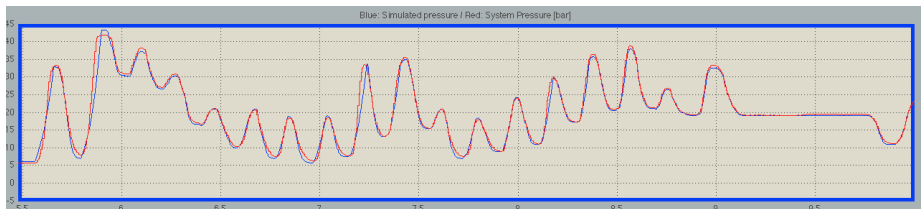
- Збільшений інтервал часу, де змодельований результат хороший. На горизонтальній осі відкладено час [с], на вертикальній осі – тиск:
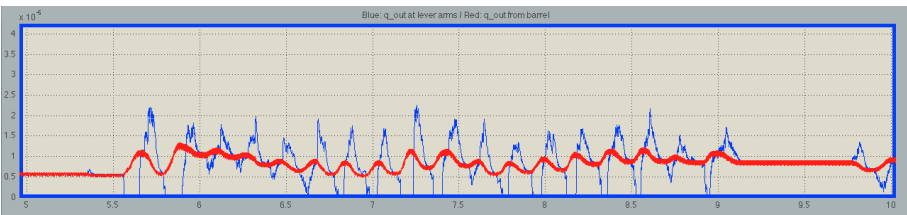
Збільшене зображення потоків з тим самим інтервалом, що й вище. На горизонтальній осі відкладено час [с], на вертикальній осі — потік [м3/с]:
Така поведінка рівняння потоку може бути джерелом помилки, але функція еластичності також може сприяти помилкам. Оскільки функція базується на статичних вимірюваннях, зміни в об’ємі відсіку, що примикає до зчеплення, спричинені рухомими частинами, не враховуються. Якщо гучність змінюється, змінюється і поведінка функції, що може пояснити помилки, які спостерігаються на початку функції зміни.
Висновок
Моделювання на машині постійного струму показує хорошу узгодженість із значеннями, наданими виробником двигуна, Buhler. Враховуючи, що ці константи двигуна мають значну дисперсію, можна зробити висновок, що налаштування цих значень у моделі може досягти ще кращого результату. Змодельовані потоки насоса значною мірою відповідають вимірюванням, зробленим Haldex. Залежні від температури функції в’язкості та щільності масла добре порівнюються з вимірюваннями рідини. Було створено функцію об’ємного модуля, але пізніше від неї відмовилися, оскільки вона не була потрібна в поточній моделі. Однак ця функція була збережена в реалізації Simulink на випадок подальшого розвитку функції еластичності. Порівняння повної моделі Gen V з вимірюваннями тестової конфігурації також показують хороші результати. Вимірювання ступінчастої реакції, зміни напруги та випадкової напруги вказують на однаковий результат. Коли досягається більш високий тиск, модель дуже уважно слідкує за цими вимірюваннями. Коли модель створює тиск від нуля або дуже низького тиску, вона відрізняється від тестів. Існує припущення, що це надто швидке зростання тиску пов’язане або з невизначеними областями в квадратному рівнянні, яке керує важелями насоса, або з помилками у функції пружності, або з обома причинами.
Як перевірити рівень масла в муфті Haldex - читайте тут.
Модель Simulink
1. Завершена модель. Модельний блок містить чотири підсистеми; блок двигуна постійного струму, блок розрахунку динаміки гідравлічної рідини, блок насоса і блок об'єму зчеплення.
2. Двигун постійного струму. Блок обчислює рівняння двигуна, описане в розділі 8. Вхідними даними для блоку є напруга u_a та крутний момент навантаження T_load. Підпрограми перемикачів виводять нуль, доки швидкість обертання вала дорівнює нулю. Це робиться для запобігання обертанню двигуна назад при нульовій напрузі.
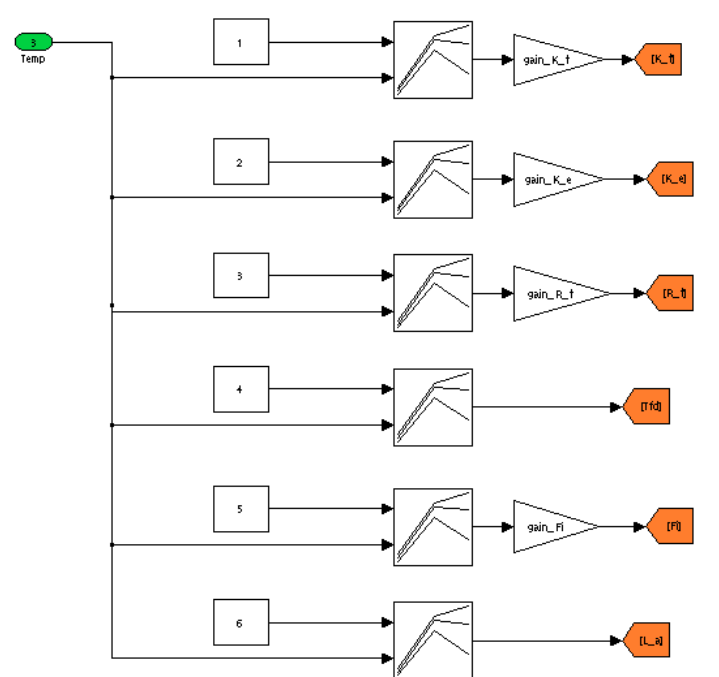
3. Параметри двигуна постійного струму. Параметри двигуна містяться в таблицях пошуку. Ці таблиці розташовані в блоці DC_motor і мають temp як вхідні дані. Ці параметри роблять двигун залежним від температури. Коефіцієнти k_t, K_e, R_t і Fi існують для того, щоб конвертувати їх із наданих одиниць у одиниці S.I.
4. Обсяг зчеплення. Блок містить інтегратор, що представляє обсяг. Це насичене, щоб запобігти досягненню від’ємних значень. Пошукова таблиця містить еластичність зчеплення. Вихід - це тиск, що діє на зчеплення.
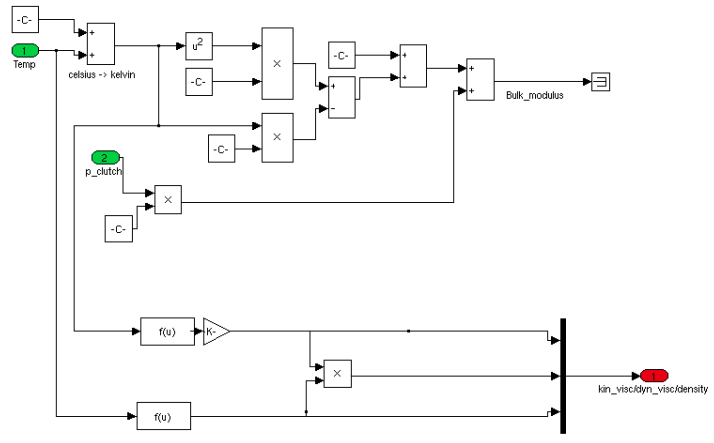
5. Гідравлічна рідина. Цей блок розраховує кініматичну та динамічну в'язкість, а також щільність гідравлічної рідини. Оскільки вони залежать від температури та тиску, P_clutch і Temp є входами. Bulk_module також обчислюється, хоча на даний момент у моделі більше немає потреби в ньому, тому цей сигнал припиняється.
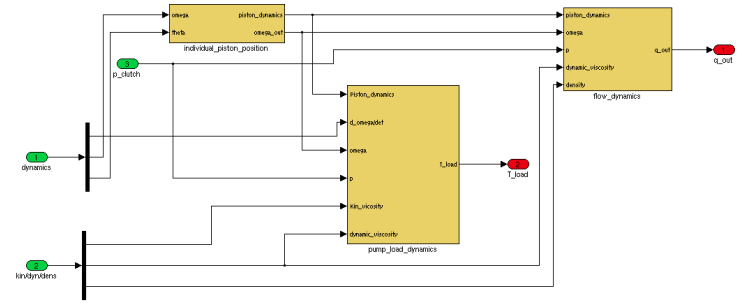
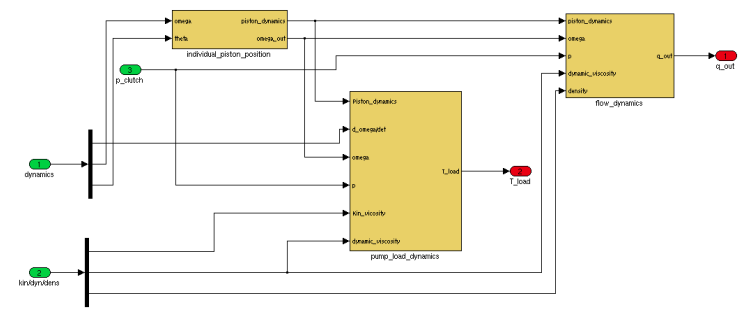
6. Насос. Насос розділений на три підсистеми. Блок individual_piston_position визначає положення, швидкість і прискорення для кожного поршня, надсилаючи їх у масив під назвою piston_dynamics. Блок pump_load_dynamics розраховує навантаження на вал двигуна. Нарешті, блок flow_dynamics представляє потік, що надходить у об’єм або виходить із нього поруч із поршнем муфти.
7. Індивідуальне положення поршня. Цей блок розраховує положення, швидкість і прискорення для кожного з шести поршнів.
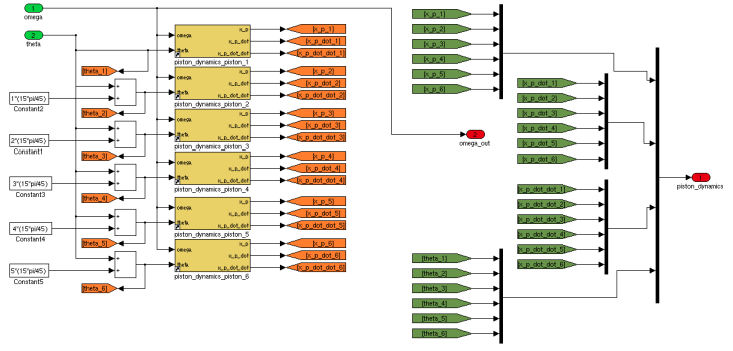
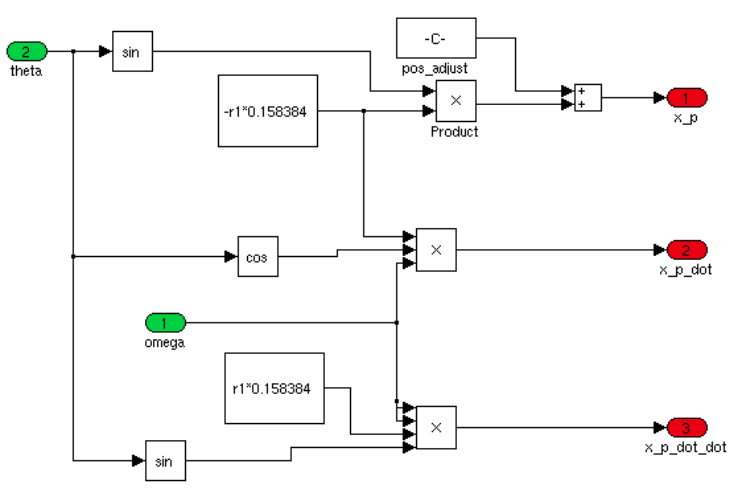
8. Поршнева динаміка. У цій підсистемі розраховується положення поршня, швидкість і прискорення. Константа pos_adjust існує, щоб збалансувати рівняння для позиції, щоб результат завжди був позитивним.
9. Динаміка поршневого навантаження. У цьому блоці розраховуються поршневі сили для кожного поршня. Потім ці сили використовуються для розрахунку моменту навантаження, що діє на вал двигуна. Це частково обчислюється в тих самих блоках обчислення сил, але втрати в підшипниках і втрати на тертя обчислюються окремо. Це пояснюється тим, що втрати в підшипнику залежать від суми всіх поршневих сил.
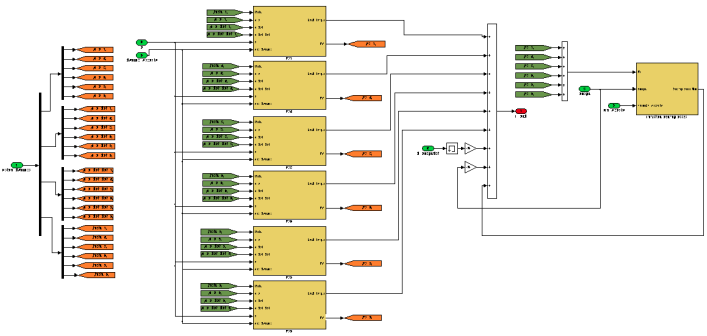
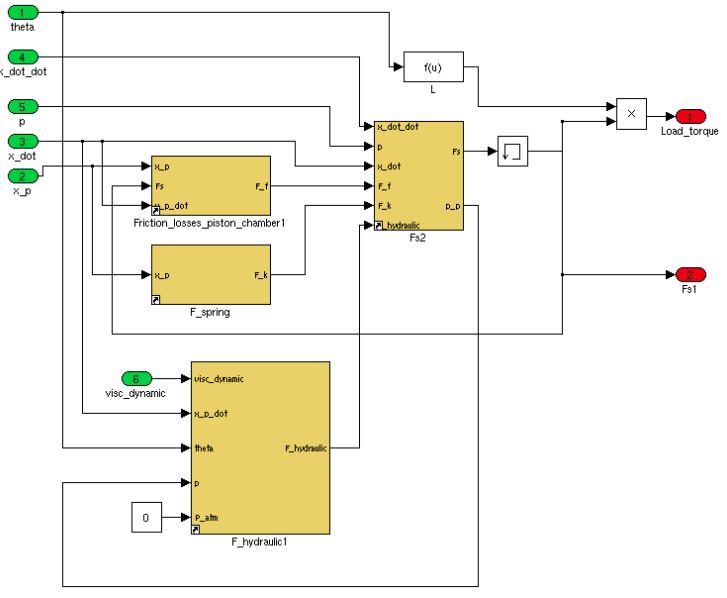
10. Fs (Зусилля на пластині перекосу). Цей блок розраховує силу F_s, силу від поршня, що діє на перекидну пластину. Блок також розраховує крутний момент навантаження, до якого призводить ця сила. F_s також визначає втрати в підшипниках і, таким чином, надсилається з блоку для використання в подальших розрахунках. Момент навантаження є сумою сили пружини, втрат на тертя і гідравлічних втрат, помножених на важіль L. Підсистема Fs2 підсумовує ці втрати і сили. Функція L обчислює важіль.
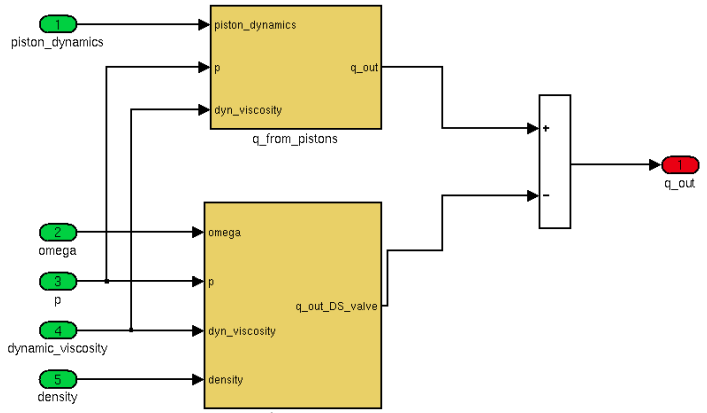
11. Динаміка течії. Блок описує суму потоків, що надходять у камеру зчеплення та виходять із неї. Позитивний q_out можна інтерпретувати як об’єм, який найбільше прилягає до поршня зчеплення. Від'ємне значення можна інтерпретувати так, ніби потік від поршнів, а також обсяг камери зчеплення виходить через отвір важеля.
12. Потік із стовбура та потік витоку. Позитивний потік, тобто потік, що виходить із кожної поршневої камери, додається разом, утворюючи загальну суму всіх цих потоків.
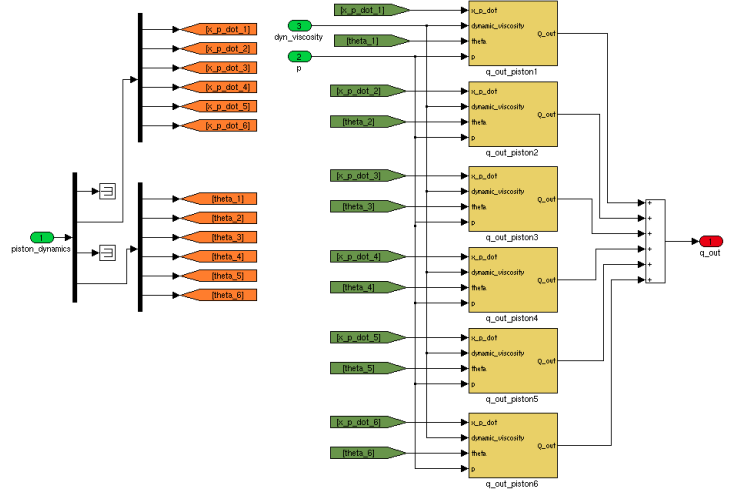
13. Потік від одного поршня. Цей блок описує вихідний потік з однієї поршневої камери через сторону високого тиску. Рівняння потоку бере площу поршня, множить її на позитивну швидкість поршня, що створює потік. Це віднімається від потоків витоків. Блок p_switch просто перемикає тиск у камері відповідно до того, де розташований поршень, зі сторони високого чи низького тиску.
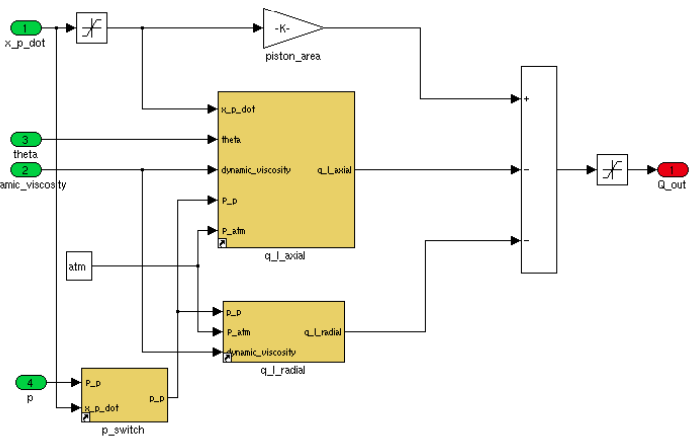
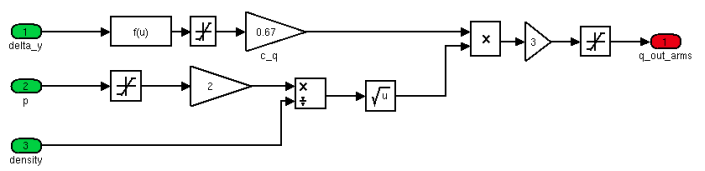
14. Потік із напірних клапанів/важелів. Ці блоки разом обчислюють потік через отвори на важелях.
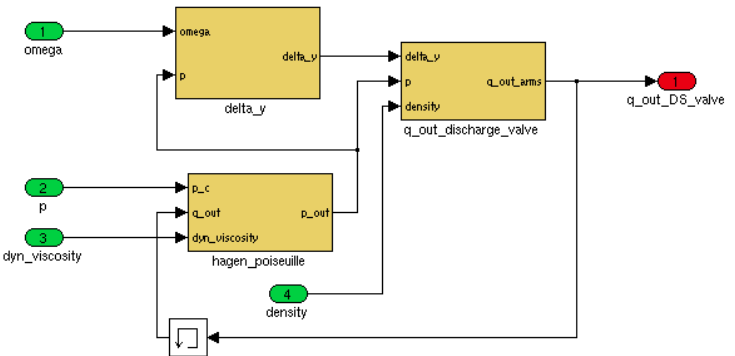
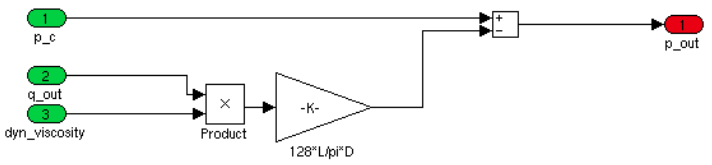
14. Втрата тиску Хагена-Пуазейля. Рівняння Хагена-Пуазейля, що описує втрати в каналі, показано вище. Вхідний сигнал є тиском в обсязі муфти. Вихідний сигнал - це тиск, що діє на кульку, з'єднану з важелем.
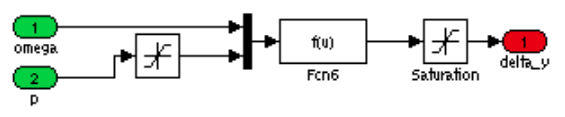
15. Дельта У. Цей функціональний блок визначає висоту важеля. Вхідний тиск насичується, запобігаючи його від’ємному значенню. Це пояснюється тим, що раніше описаний блок втрат Хагена-Пуазейля, якщо об’ємний тиск зчеплення дорівнює нулю, змусить тиск досягти від’ємних значень, що нереально.
16. Витікає з випускних клапанів. Це рівняння, що описує потік через отвір. Функціональний блок у верхній частині моделі обчислює площу цього отвору. Потік множиться на три, оскільки це кількість отворів, і в результаті виходить загальний потік.